Скачать презентацию
Идет загрузка презентации. Пожалуйста, подождите

1
« Адаптивная система автоматического управления движением космического манипулятора» Автор: Косарев Игорь Викторович, класс 11 Б. Государственное бюджетное образовательное учреждение города Москвы центр образования 1748 «Вертикаль» , г. Москва, Сиреневый бульвар, д. 73, корп. 3 (телефон/факс) +8(499) :.. 11 B ,,, 73, 3 ( / ) +8(499)

2
В 2011 году разработан «липучий» манипулятор для захвата объектов в космосе. Устройство работает за счёт электростатического притяжения, которое может возникать между роботизированной рукой и любым другим объектом в космическом пространстве. Устройство представляет собой телескопическую «руку», способную удлиняться на 100 метров. На её конце помещается электроадгезионный элемент

3
Задачей робота поставим принятие положения при котором устройство должно обойти препятствие и "взять" объект, т.е разместить точечный объект внутри "схвата". Для этого найдем множество положений манипулятора, находясь в которых он касается препятствия. Здесь нужно рассматривать два случая: R> L 1 и R L 1 R
L 1 и R L 1 R">

4
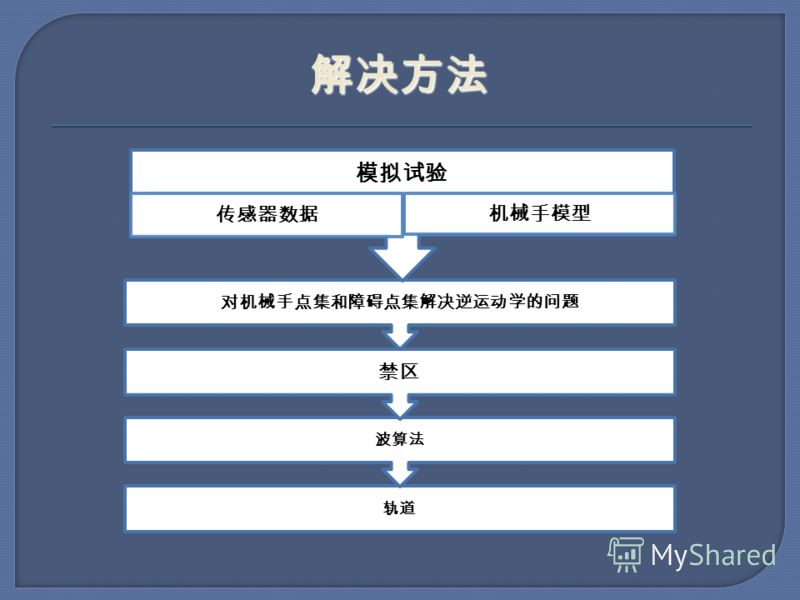
ТРАЕКТОРИЯ ВОЛНОВОЙ АЛГОРИТМ ЗАПРЕЩЕННЫЕ ЗОНЫ РЕШЕНИЕ ОБРАТНОЙ КИНЕМАТИЧЕСКОЙ ЗАДАЧИ ДЛЯ МНОЖЕСТВА ТОЧЕК МАНИПУЛЯТОРА И ПРЕПЯТСТВИЯ МОДЕЛИРУЕМ Данные датчика Модель манипулятора МЕТОД РЕШЕНИЯ

9
Для построения графика работы манипулятора рассчитаем углы поворота звеньев манипулятора при разных значениях параметров Lx,B,A Lx,B,A Для этого будем изменять указанные параметры с малым шагом (x) в пределах их возможных значений., (x).
 в пределах их возможных значений., (x).")
10
Волновой алгоритм это алгоритм, который позволяет найти минимальный путь в графе. ВОЛНОВОЙ АЛГОРИТМ

Еще похожие презентации в нашем архиве: