Скачать презентацию
1
Модели замкнутых электромеханических систем

2
Для того, чтобы разработать модель замкнутой ЭМС необходимо составить: Систему уравнений, описывающих процессы в элементах системы; Структурные схемы отдельных элементов системы; Иметь представление о функциональном назначении этих элементов в составе функциональной схемы замкнутой электромеханической системы;

3
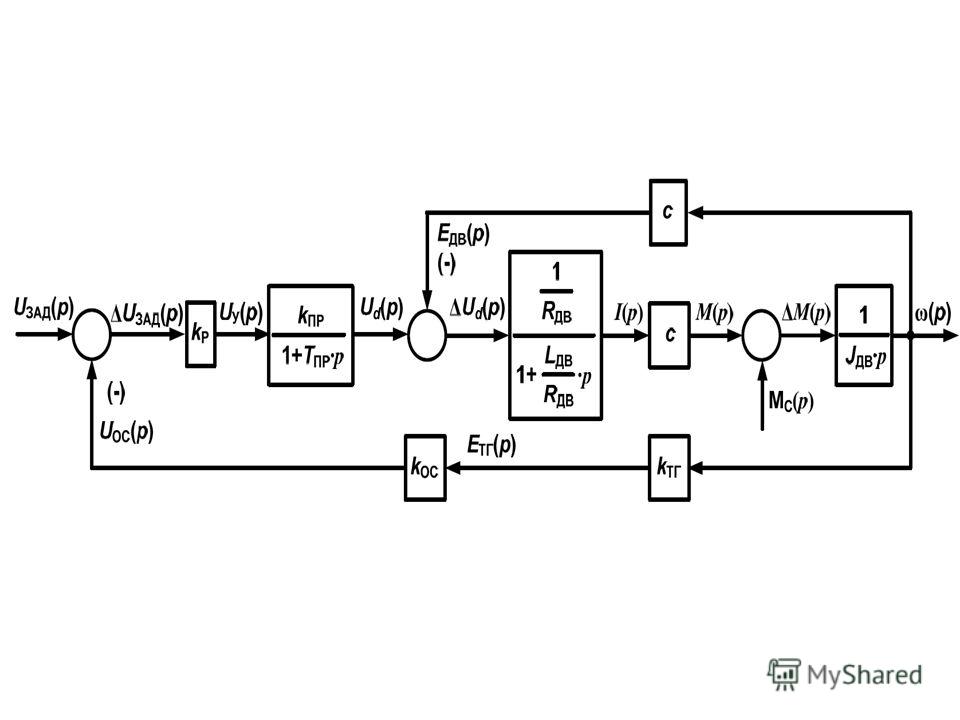
Модель замкнутой электромеханической системой с П-регулятором В замкнутой ЭМС с пропорциональным (П) регулятором, двигателем постоянного тока независимого возбуждения и широтно- импульсным преобразователем обратная связь осуществляется за счет датчика скорости, которым обычно служит тахогенератор. Структурная схема такой ЭМС имеет следующий вид:
 регулятором, двигателем постоянного тока независимого возбуждения и широтно- импульсным преобразователем обратная связь осуществляется за счет датчик")
5
Система уравнений Система дифференциальных уравнений (СДУ), описывающая данную ЭМС, состоит из трех уравнений: уравнение электрического равновесия якорной цепи ДПТ НВ; уравнение движения электропривода; уравнения состояния ШИП.
, описывающая данную ЭМС, состоит из трех уравнений: уравнение электрического равновесия якорной цепи ДПТ НВ; уравнение движения электропривода; уравнения состояния ШИП.")
6
При составлении уравнения состояния ШИП внесем для удобства коэффициент передачи регулятора k Р в передаточную функцию преобразователя. Тогда коэффициент передачи ШИП будет равен произведению k ПР k Р, причем

7
Уравнение состояния преобразователя: Уравнение электрического равновесия ДПТ НВ: Уравнение механического равновесия ДПТ НВ:

8
Разрешая каждое уравнение относительно производных, запишем СДУ в нормальной форме Коши:

9
Математическая модель ЭМС с П- регулятором Математической моделью ЭМС является СДУ в векторно-матричной форме представленная в виде:

10
где - вектор переменных состояний - вектор свободных членов

11
- матрица коэффициентов (параметров ЭМС)
")
12
Из полученной математической модели видно, что помимо двух переменных состояния двигателя (тока и скорости) ЭМС имеет третью переменную состояния – выходное напряжение ШИП, обусловленную инерционностью преобразователя.
 ЭМС имеет третью переменную состояния – выходное напряжение ШИП, обусловленную инерционностью преобразователя.")
13
Модель замкнутой электромеханической системой с ПИ-регулятором Структурная схема электромеханической системы с ПИ- регулятором, двигателем постоянного тока независимого возбуждения и широтно-импульсным преобразователем имеет следующий вид:

14
Структурная схема

15
Уравнения электрического состояния В данном случае уравнение равновесия напряжения, подводимого к обмотке якоря двигателя имеет вид: где напряжение питания двигателя

16
К этим двум уравнениям прибавляется уравнение состояния ПИ-регулятора: где T p - постоянная времени регулятора. Уравнение механического равновесия останется без изменений:

17
Математическая модель ЭМС с ПИ - регулятором Математической моделью ЭМС является СДУ в векторно-матричной форме представленная в виде:

18
где - вектор переменных состояний - вектор свободных членов СДУ

19
- матрица коэффициентов (параметров ЭМС)
")
20
В замкнутой электромеханической системе с ПИ регулятором третьей переменной состояния выступает напряжение управления интегральной частью ПИ-регулятора.










 Показатели регулирования скорости ЭП 2) Регулирование момента, тока, положения ЭП 3) Способы регулирования.")











