Скачать презентацию
1
МЕХАНИКА РОБОТОВ Если я видел дальше других, то потому, что стоял на плечах гигантов. И. Ньютон

2
Механика - наука о движении Механика – это наука о механическом движении материальных тел ( т. е. об изменении с течением времени взаимного положения тел или их частей в пространстве ) и их взаимодействиях.
 и их взаимодействиях.")
3
Структурная схема ассоциированных дисциплин

4
Основные понятия и определения Материальная точка – это геометрическая точка, обладающая массой. Как и материальное тело, обладает свойством инертности и способностью взаимодействовать с другими материальными телами. Абсолютно твердым телом называется тело, сохраняющее свою геометрическую форму неизменной ( расстояние между двумя любыми точками тела в процессе движения остается неизменным ) независимо от действия других тел. Механическая система - совокупность материальных точек, взаимодействующих друг с другом и с телами, не включенными в эту совокупность.

5
Основные понятия и определения Число степеней свободы - число возможных перемещений системы. Обобщенными координатами называется совокупность независимых между собой параметров любой размерности, однозначно определяющих положение системы в пространстве в каждый момент времени. Связью, наложенной на материальную систему, называется любое наперед заданное условие геометрического или кинематического характера, накладывающее ограничения на положения и ско рости точек системы.

6
Основные понятия и определения ОМ - идеальный стержень. Это двусторонняя связь, которая препятствует перемещению точки в обе стороны вдоль стержня, точка М должна все время оставаться на сфере радиуса ОМ= l.

7
Основные понятия и определения Аналитически связи представляются уравнениями, связывающи ми время, координаты точек и производные от координат по времени. Каждой связи соответствует свое уравнение. или Реакции связей - это силы, с которыми связи действуют на точки системы.

8
Основные понятия и определения Связь называется голономной, если аналитически она может быть представлена конечным ( не дифференциальным ) уравнением относительно координат точек и времени, не содержащим производных от координат : Такая связь называется иначе геометрической, она накладывает явно ограничения только на положения точек системы. Уравнение связи
 уравнением относительно координат точек и времени, не содержащим производных от координат : Такая связь называе")
9
Основные понятия и определения Связь, в уравнение которой входят производные от координат по времени, называется неголономной или дифференциальной. При этом предполагается, что уравнение не может быть проинтегрировано, иначе это будет голономная связь. Пример. Метод погони или чистого преследования - это метод сближения перехватчика с целью, при котором во все время движения векторная скорость перехватчика направлена на цель. Уравнение связи

10
Кинематика точки Кинематика рассматривается движение с чисто геометрической точки зрения без учета их масс и действующих на них сил. Движение материального объекта – это изменение его положения с течением времени по отношению к другому телу ( системе отсчета, т. е. системе координат и часов ). Всякое движение происходит в пространстве и времени, т. е. сколь угодно малое перемещение тела происходит не мгновенно, а в течение некоторого промежутка времени. Основные задачи кинематики можно определить следующим образом : найти способы задания движения и, исходя из них, найти методы определения скорости и ускорения.

11
Кинематика точки При движении в пространстве в каждый определенный момент времени точка занимает вполне определенное положение. Геометрическое место положений движущейся точки называют траекторией точки. В зависимости от формы траектории точки движение называют прямолинейным ( траектория – прямая линия ) или криволинейным ( траектория – кривая линия ). Движение точки по отношению к выбранной системе отсчета считается заданным, если известен способ, с помощью которого можно определить положение точки в любой момент времени. Задать движение точки – это означает указать способ, который позволяет в любой момент времени определить ее положение по отношению к выбранной системе отсчета..

12
Способы задания движения Векторный способ. - закон движения - скорость - ускорение Годографом вектора называют кривую, которую вычерчивает конец этого вектора ( начало вектора находится в точке ) при изменении его аргумента ( в данном случае – времени ). Годографом радиуса - вектора, определяющего положение точки, будет траектория.
 при изменении его аргумента ( в данном случае – времен")
13
Способы задания движения Координатный способ. - закон движения - скорость - ускорение.

14
Способы задания движения Естественный способ. - закон движения Скорость где – единичный вектор в направлении касательной ; – модуль скорости.

15
Способы задания движения Естественный способ. Ускорение В каждой точке кривой можно указать три взаимно перпендикулярных направления с единичными векторами : – касательной, – главной нормали и – бинормали. Проекция ускорения на направление касательной называется касательным ускорением, а на направление главной нормали – нормальным. Касательное ускорение характеризует изменение модуля скорости, а нормальное ускорение – изменение скорости по направлению.

16
Структурные компоненты роботов Твердые тела, входящие в механическую систему, называются звеньями. Входным называется звено, которому сообщается движение. Выходным называется звено, совершающее рабочее движение. Кинематическая пара ( КП )- подвижное соединение двух звеньев, допускающее их вполне определенное относительное движение. КП классифицируют : 1) по числу степеней свободы звеньев в относительном движении, 2) по числу связей, налагаемых парой на относительное движение звеньев.
- подвижное")
17
Структурные компоненты роботов Классификация КП : 1) одно -, двух -, трех -, четырех - и пятиподвижные, 2) пятого, четвертого, третьего, второго и первого класса.
 одно -, двух -, трех -, четырех - и пятиподвижные, 2) пятого, четвертого, третьего, второго и первого класса.")
18
Структурные компоненты роботов Манипуляторы роботов – в основном одноподвижные пары : поступательная, вращательная и винтовая Поступательная Вращательная Винтовая

19
Структурные компоненты роботов Совокупность звеньев, образующих между собой кинематические пары, называется кинематической цепью. К. ц. могут быть простыми и сложными, открытыми и замкнутыми, плоскими и пространственными. В простой к. ц. каждое из ее звеньев входит в состав одной или двух к. п., а в сложной к. ц. имеются звенья, входящие в состав трех и более к. п. В открытой к. ц. имеются звенья, входящие в состав одной к. п., а в замкнутой цепи каждое звено входит в состав 2- х и более к. п. Если точки всех звеньев двигаются в одной или параллельных плоскостях, то к. ц. называется плоской, в противном случае к. ц. – пространственная ( точки звеньев описывают плоские кривые в непараллельных плоскостях или пространственные кривые ).

20
Структурные компоненты роботов Кинематические цепи

21
Структурные компоненты роботов символическое представление структуры манипулятора Степень подвижности

22
Итерационная схема процесса конструирования

23
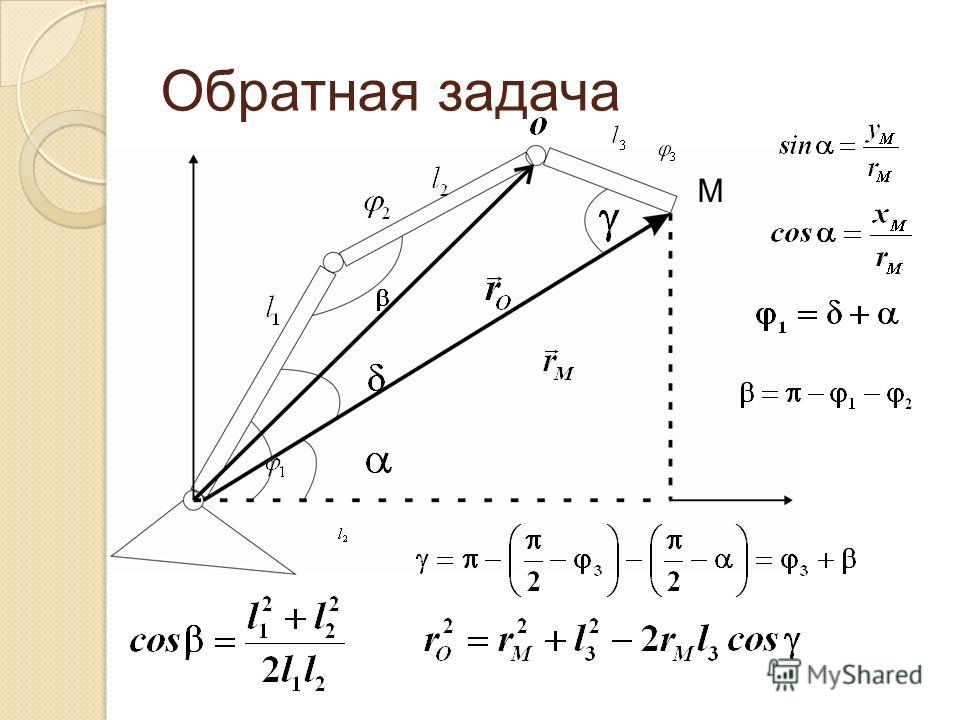
Кинематика заданного манипулятора Прямая задача: по заданным законам движения определить положение. Обратная задача: по заданному положению определить законы движения.

24
положение скорость ускорение Прямая задача

25
Обратная задача
















 в физике раздел механики, изучающий математическое описание ( средствами геометрии, алгебры, математического анализа.")





