Скачать презентацию
1
Бортовая микропроцессорная система автоведения пассажирского электровоза (УСАВПП) и регистратор параметров движения и автоведения (РПДАП)
 и регистратор параметров движения и автоведения (РПДАП)")
2
Назначение системы УСАВПП - автоматизированное управление электровозом пассажирского поезда с целью точного выполнения графика движения, при условии выбора энергетически рациональных режимов движения. Расчет энергетически оптимальной траектории осуществляется на борту электровоза в реальном масштабе времени с учетом поездной обстановки в процессе движения.

3
Назначение системы УСАВПП

4
Автоматизированное ведение поезда ; Советчик машиниста по оптимальным режимам ведения при ручном управлении. Система УСАВПП имеет два основных режима работы:

5
Возможности автомашиниста Реализация функций информационной поддержки деятельности машиниста. Снижение негативного влияния психофизических факторов сложности работы машиниста. Повышение точности выполнения графика движения. Экономия электроэнергии за счет рационального выбора режимов движения поезда.

6
Возможности автомашиниста Автоматический разгон поезда до расчетной величины скорости, поддержание расчетного значения скорости за счет автоматического управления тягой и торможением поезда. Информирование машиниста в любых погодных условиях о местонахождении поезда и приближении к остановочным пунктам. Обеспечение установленной скорости подъезда к местам ограничения скорости, светофорам, требующим снижения скорости, а также производит остановку поезда служебным торможением перед запрещающим огнем светофора за 200 м.

7
Возможности автомашиниста Выдача речевых сообщений машинисту при приближении поезда к местам, требующим повышенной бдительности (ограничения скорости, показания светофоров, переездам и т. д.). Работа в двух режимах: в режиме автоведения и в режиме советчика. Удобный интерфейс, обеспечивающий работу в режиме меню пользователя любого уровня подготовки.
. Работа в двух режимах: в режиме автоведения и в режиме со")
8
Конструктивное исполнение УСАВПП – модульное, позволяющее устанавливать ее на любом типе электровоза

9
Система УСАВПП обеспечивает выполнение следующих функций: Прием сигналов от датчиков давления с уравнительного резервуара, тормозного цилиндра и тормозной магистрали, тока отопления и токов тяговых двигателей, напряжения в контактной сети, датчика пути и скорости; Ввод в систему с клавиатуры оперативной информации (табельный номер, номер поезда, значение ограничения скорости и т.д.); Прием информации о сигналах АЛСН, реле боксования, срабатывания защиты, вида торможения; Расчет оптимальной траектории и выработку управляющих сигналов в цепи управления электровозом; Расчет тормозной кривой и выдачу сигналов в цепи дистанционного управления электродинамическим, электропневматическим и автоматическим тормозом; Выдачу речевой служебной информации для машиниста.

10
Состав УСАВПП

12
Тормозная подсистема Предназначена для дистанционного управления торможением поезда и отпуска тормозов

13
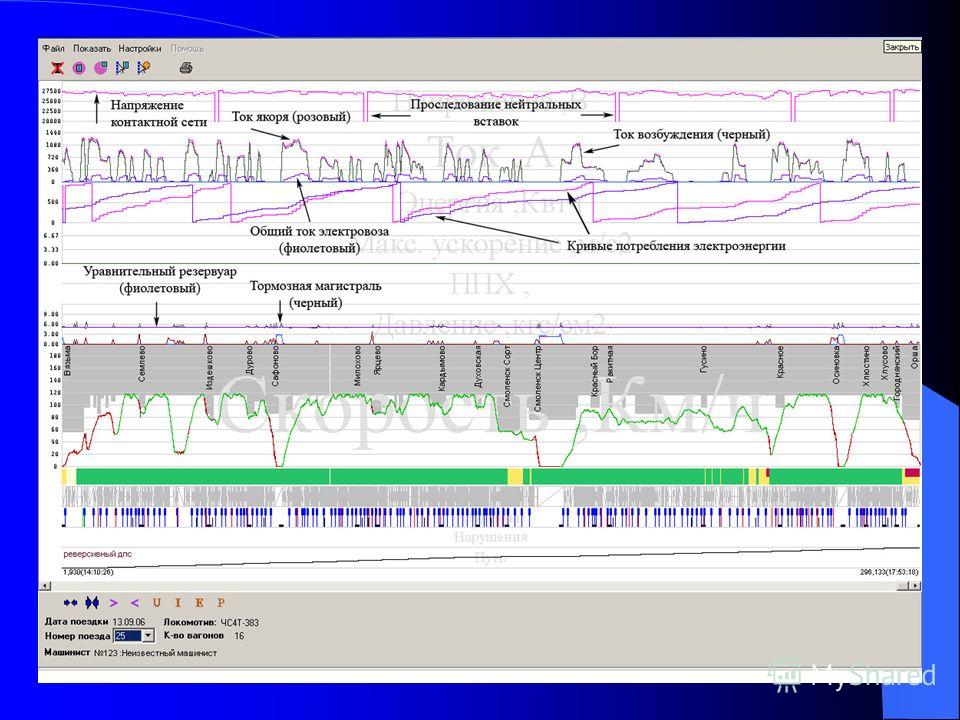
Состав РПДАП

15
Диагностика в реальном масштабе времегни Срабатывание ГВ Величина токов тяговых двигателей Потребление электроэнергии Величина напряжения в контактной сети

16
Диагностика при расшифровке Работа групповых переключателей По величине напряжения в контактной сети и выводу пусковых сопротивлений возможно установить причину перегрева тяговых двигателей Режимы управления тягой и торможением Режимы разностного боксования Выполнение графика

17
Безопасность Контроль скорости Выполнение графика Служебные сообщения локомотивной бригада о местах особой бдительности Автоматическое считывание мест ограничения скорости



 ПУЛЬС-Т.")







")






 Концепция использования информации Вид ИС Цель использования 1950-1960 Бумажный поток расчетных документов ИС обработки расчетных документов.")



 24-06-44 24-29-12; моб. тел. (296) 24-29-11;")
