Скачать презентацию
Идет загрузка презентации. Пожалуйста, подождите

1
1 Без щук Щуки с карасями Давление хищника у Z Ландшафт из карасей

2
Без щук Щуки (без учета опосредованных влияний) Щуки с карасями Давление хищника Ландшафт карасей Размерная запись Кривошеев О.И. МЭСИ, каф. Прикладной математики
 Щуки с карасями Давление хищника Ландшафт карасей Размерная запись Кривошеев О.И. МЭСИ, каф. Прикладной математики")
3
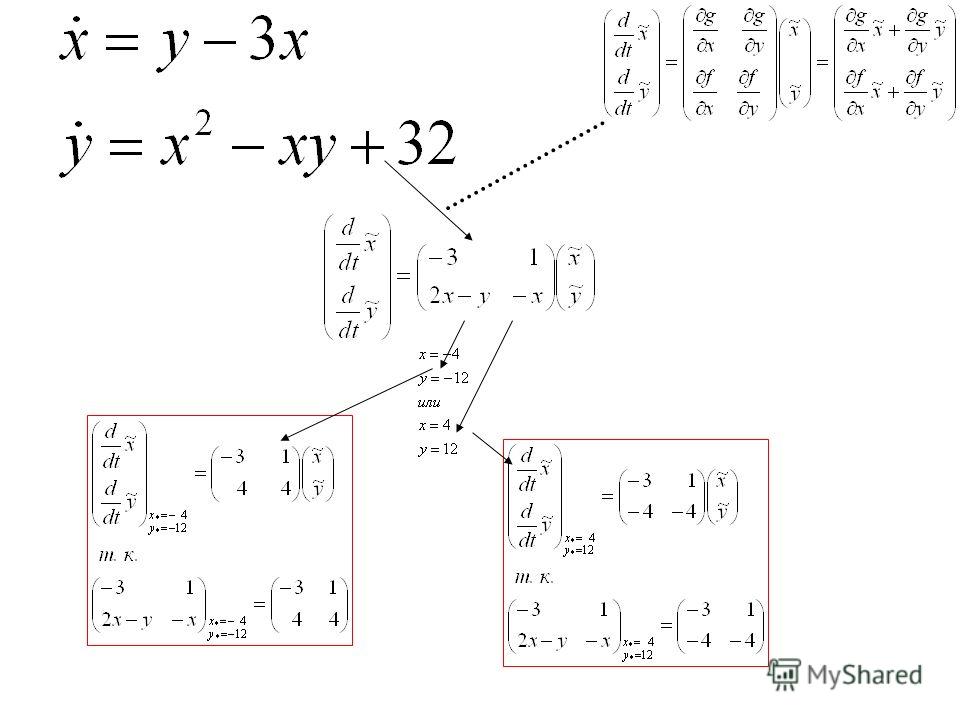
параметр,Х параметр, У построить главные изоклины Найти равновесия Линеаризовать систему в точке Найти собственные значения Вычислить собственные вектора Мотивировки

4
Линейная алгебра Содержание КУРСА Векторы и л пространства Матрицы.Операторы (преобразования) Мет. Гаусса Формы и поверхности Геометрия СВ =0 мало
 Мет. Гаусса Формы и поверхности Геометрия СВ =0 мало")
5
1-d задача x построить главные изоклины Найти равновесия Линеаризовать систему в точке Найти собственные значения Вычислить собственные вектора устойчивость Не устойчивость Решение + - -

6
1d –отображение.. x Решение

7
устойчивость Непрерывный критерий устойчивости Дискретный критерий устойчивости устойчивость неустойчивость координаты Комплексная плоскость Комплексная плоскость устойчивость Круг не важен запрещено неустойчивость

8
1-я производная: обобщение.

9
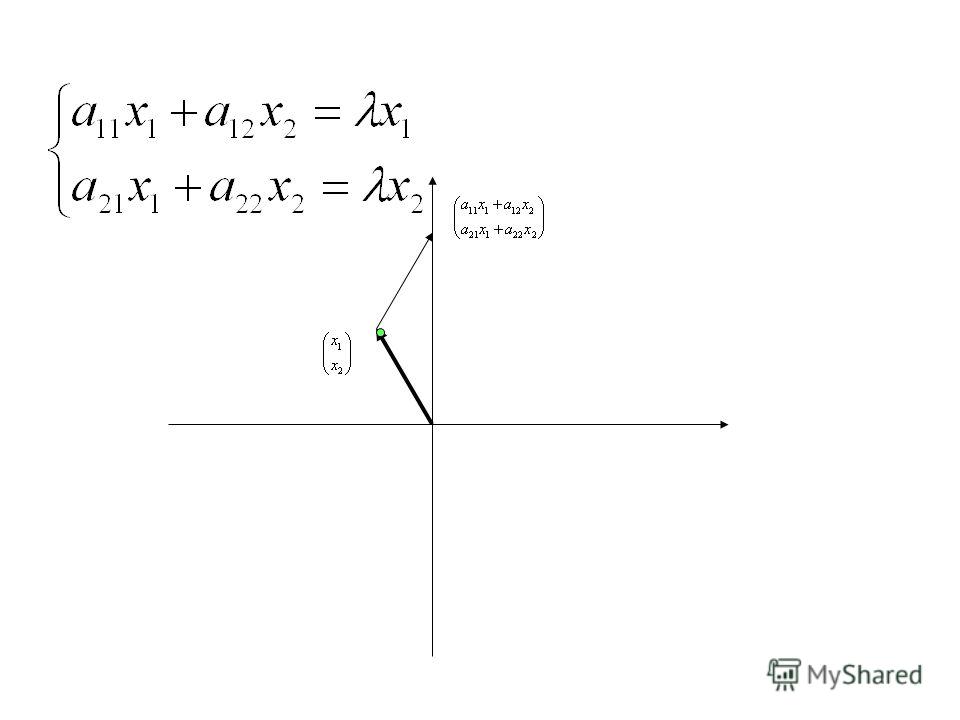
Задача. Собственные значения. y х

10
S D сёдла фокусы неуст. узлы Уст узлы неуст. уст.

11
0

12
Строят главные изоклины Находят равновесия Линеаризуют систему в точке Находят собственные значения Вычисляют собственные вектора #b=|имени| 4 равновесия 2 равновесия

14
0 задача

16
у х

17
Вектор А В начало конец. Вектор – упорядоченная пара точек, первая из которых называется началом, вторая концом вектора. Обозначают или Нулевой вектор – вектор, начало и конец которого совпадают Длина вектора |a| Вектор характеризуется длиной, точкой приложения и направлением. Два вектора считаются равными, если длина и направление совпадают

18
= Ситуации три Закрепленный. Два вектора равны если из начала совпадают, Сила трения. Скользящие. Если можно совместить переносом вдоль прямой, на которой они лежат Все остальные силы в физике. Свободный. Векторы равны если их можно переместить параллельным переносом, т.е. их длины равны, они лежат на параллельных прямых и направления равны. Пример – поле в пластинах конд-ра. Наш курс: все векторы свободные.

19
Коллинеарные векторы Если они лежат на одной прямой или на параллельных прямых Компланарные векторы: Которые лежат на параллельных прямых.

20
Сложение x y 2K a b c Сложение векторов – это операция, которая двум векторам сопоставляет третий. Для этого нужно перенести второй вектор к концу первого, соединить начало 1го и конец второго..

21
умножение x y 2K a c Умножение вектора на число это операция которая сопоставляет вектору и числу другой вектор: Вектору а и числу λ сопост. вектор b, т.что |b|=|λ| |a| b || a (a и b коллинеарны) Векторы b и a однонаправлены, Если λ положительно и противоположно направлены, если λ – отрицательно.
 Векторы b и a однонаправлены, Если λ положител")
22
Правило параллелограма Сложение векторов x y 2K Сложение коммутативно a b а b c

23
Свойства операций В результате применения различных линейных операций можно получать различные векторы, т.е. (большие) мн-ва векторов
 мн-ва векторов 1234567812345678")
24
Определение: множество называется замкнутым относительно некоторой операции, если в результате применения этой операции к любым элементам множества, снова получается элемент того же множества. Определ. Множество векторов замкнутое относительно линейных операций (сложение, умножение на число) называется векторным пространством.

25
Примеры векторных пространств М-во всех векторов лежащих на данной прямой(мн-во всех коллинеарных др.другу векторов.) М-во всех векторов лежащих в данной плоскости (мн-во компланарных векторов.) множество всех геометрических векторов нашего трёхмерного пространства. Состоит из одного 0-го вектора. Принцип матрёшки :Каждое предыдущее – подмножество следующего Определение: Если одно векторное пространство V1, является подмножеством другого V2,то V1 является подмножеством V2.
 М-во всех векторов лежащих в данной плоскости (мн-во компланарных векторов.) множество всех геометрических векторов нашего трёхмерно")
26
Линейные комбинации. Вазьмём несколько векторов, умножим их на числа Получим выражение вида Такое выражение называется линейной комбинацией векторов с коэффициентами a b c d c c

27
Разложение вектора по векторам Определение. Если вектор b является линейной комбинацией векторов, то говорят, что b линейно выражается через эти векторы, или иначе раскладывается по этим векторам. Если, то называются коэффициентами разложения вектора b по сист векторов. Пояснение. В линейной алгебре мн-во векторов принято называть системой векторов, а подмножество - подсистемой

28
(не) тривиальная линейная комбинация – линейная комбинация в которой (не) все коэффициенты =0. система подсистема
 тривиальная линейная комбинация – линейная комбинация в которой (не) все коэффициенты =0. система подсистема")
29
Линейная зависимость / независимость векторов Линейная зависимость: система векторов называется линейно зависимой, если существуют такие числа не все равные нулю, что Т.е. ноль раскладывается по этой системе в нетривиальную линейную комбинацию. Понятие линейной зависимости относится к системе. Это свойство системы векторов. Система из более чем одного вектора линейно зависима тогда и только тогда, когда один из векторов этой системы раскладывается по остальным (не важно тривиально или не трив.) Д.: if 1 из коэф не0, на него поделить – получится разложение.

30
Линейн. независимость Линейная независимость: система векторов называется линейно независимой, если может быть верно только когда все равны нулю. Линейно независимая система – та, которая не является линейно зависимой. Т.е. нулевой вектор раскладывается по этой системе однозначно, только в тривиальную комбинацию. Иначе говоря, ни один из векторов системы не может быть выражен через остальные.

31
1.Если в системе какая-либо подсистема линейно зависима, то вся система линейно зависима. 2.Если система линейно независима, то любая её подсистема линейно независима. Свойства систем векторов.

32
Базис. Пусть у нас есть система векторов. Последний вектор раскладывается по системе остальных. Если снова- снова отбрасываем т.который выражается. Проводим действие до тех пор, пока у нас не окажется линейно независимая система, которая является подсистемой исходной системы. Эта линейно независимая система является максимальной в том смысле, что если в неё добавить любой выброшенный вектор. Любая максимальная линейно-независимая подсистема будет называться базисом.

33
Базис и ранг системы векторов. Определение 2: Базисом системы векторов называется упорядоченная линейно- независимая подсистема, такая, что любой вектор системы по ней раскладывается. Ранг системы векторов – количество векторов её базиса. Утверждение – ранг системы – это максимальное число линейно независимых векторов. Замечание – это разложение единственно.

34
Базис и размерность пространства Определение: Базисом векторного пространства называется упорядоченная линейно-независимая система векторов, такая, что любой вектор пространства по ней раскладывается Размерность. Определение: размерность пространство это число (количество) его базисных векторов. Утв.: В n-мерном пространстве любые n+1 векторов лимнейно-зависимы. пояснение. Базисов может быыть предложено много, но при этом ранг и размерность остаётся одним и тем же.

35
Пример. Базиса не существует Базис – любой ненулевой вектор, Базис – любые 2 неколлиннеарных вектора, Базис – любые 3 некомпланарных вектора,

36
Координаты Рассмотрим R 3 Выберем базис. Пусть он обозначен Возьмем любой вектор Вектор x раскладывается по базису Пусть коэффициенты этого разложения Они (иначе) называются координатами вектора х в базисе Т.к. разложение единственно, то координаты однозначно определяются по вектору и наоборот. Таким образом любой вектор полностью задаётся своими координатами в выбранном базисе
 называются координатами вектора х в базисе Т.к. разложение единственно, то координаты о")
37
Линейные операции в координатах Базис выбран и не меняется. сложение Умножение на число.

38
Система координат Определение- Декартова система координат: совокупность точки и базиса. O Точка О – начало координат Все векторы данного пространства к ней приложены, закреплены, из неё исходят. - базисные векторы Проводим прямые через базисные векторы, придаём им то же направление. O Полученные направленные прямые являются осями координат.: Первая ось – ось абсцисс, вторая – ординат, третья апликат.

39
r- вектор Координатная плоскость – это плоскость – проведённая через две координатные оси. У нас есть три плоскости ху, хz и yz. Выберем произвольную Точку в пространстве, Проведём вектор из начала координат в эту точку. Полученный вектор называется радиус-вектор заданной точки: ОМ – радиус вектор точки М. Ещё обозначается буквой r. Поскольку начало координат фиксированное, радиус-вектор зависит только от точки М и наборот. (любой радиус вектор определяет нам точку). Радиус вектор определяется своими координатами, тогда декартовы координыты точки – координаты её радиус вектора. В пространстве точка задаётся 3-мя координатами, на плоскости 2мя, на прямой 1й. Обратно, чтобы найти координаты вектора, надо из его конца вычесть его начало.

40
Ортогональная система Если все базисные векторы взаимно ортогональны и имеют единичну длину, такой базис называется ортонормированным (ортонормированный=ортогональный + нормированный). Такому ортонормированному базису соответствует прямоугольная декартова система координат.
. Такому ортонормированному базису соответствует прямоугольная дека")
41
Линейная зависимость

42
разложение по базису x y 2K Разложение по новому базису

43
Замена Базиса и матрица перехода x y 2K Разложение по новому базису

44
Уравнение прямой в параметрической форме О x z y

45
x y Уравнение задаёт ортогональную поверхность

46
x y

47
x y

48
Множество векторов, ортогональных данному y х z

49
Метод координат Расстояние между двумя точками. Деление отрезка в заданном соотношении Вычисление координат вектора (изв н и конец)
")
50
Квадратичная форма Является ли данная форма положительно определённой выделение квадрата Положительная Неотрицительная Неопределённая

52
Процедура ортогонализации базиса Грамма-Шмидта Ортогональный

53
Произведение матриц S F

54
графический смысл умножения м.ц S F T 1 3 S F T B 8282 B62

56
М. поворота

58
Отображение пространства в себя О x z y

59
Задача. Собственные значения. y х

60
ЛПР Критерий 1 (К1) 1 Альт-ва 1 (a1) 2 Альт-ва 2 (a2) Критерий 2 (К2) 0,3 0,7 0,3 0,4 0,7 0,6 Верхний уровень Нижний уровень ЛПР K 1 K 2 Верхний уровень Нижний уровень Советник 1 (с1) Советник 2 (с2) a3) Альт-ва 3 (a3) средний уровень ЛПР a 1 a 2 (a1)(a2) (a3) a 3a ,72 0,15 0,13 0,72 0,13 0,15 Ответ: выбираем решение (альтернативу) a1
 1 Альт-ва 1 (a1) 2 Альт-ва 2 (a2) Критерий 2 (К2) 0,3 0,7 0,3 0,4 0,7 0,6 Верхний уровень Нижний уровень ЛПР K 1 K 2 Верхний уровень Нижний уровень Советник 1 (с1) Советник 2 (с2) a3) Альт-ва 3 (a3) средний уровень ЛПР a 1 a 2 (a1")
61
Альт. 1 Альт. 2 ЛПР 0,7*0,6+0,7*0,3 =0,63 0,7*0,4+0,3*0,3 =0.37 Альт. 1 Альт. 2ЛПР Критерий 1 Критерий 2 0,3 0,7 0,3 0,4 0,7 0,6 Верхний уровень Нижний уровень

62
ЛПР Критерий 1 Альт. 1 Альт. 2 Критерий 2 0,3 0,7 0,3 0,4 0,7 0,6 Верхний уровень Нижний уровень ЛПР вес 2 - ? вес 1 -? Альт. 1 Альт. 2 ? Верхний уровень Нижний уровень

63
Замена базиса -матрицы Обратное преобразование Формула замены базиса для матриц где S – матрица перехода

64
Задача - перемножить

65
Три взгляда Теорема Кронекера -Капелли Строковые операции: сложение/умн Матричный

66
Теорема Кронекера -Капелли Матричный Система имеет решения тогда и т.т., к. свободный столбец разложим по столбцам матрицы А А это возможно т.ит.т.к. ранг расширенной матрицы совпадает с рангом матрицы системы

67
x y determinant (определитель) x y x y x y S=1 x y y S=-1 Определитель параллельности:
 x y x y x y S=1 x y y S=-1 Определитель параллельности:")
68
Объём параллелограмма О x y Смешанное произведение векторов

69
Вычисление determinanta чередование знаков

70
Прав. * ЗхЗ детерминант -

71
Определение. Перестановки.

72
Свойства детерминанта При прибавлении 1й строки матрицы к другой детерминант не меняется При прибавлении любой комбинации оставшихся строк матрицы детерминант не меняется При перестановке строк детерминант меняет знак Умножение на число

73
параметр,Х параметр, У

74
параметр,Х параметр, У Главные изоклины

78
Горизонтальная изоклина вертикальная изоклина

79
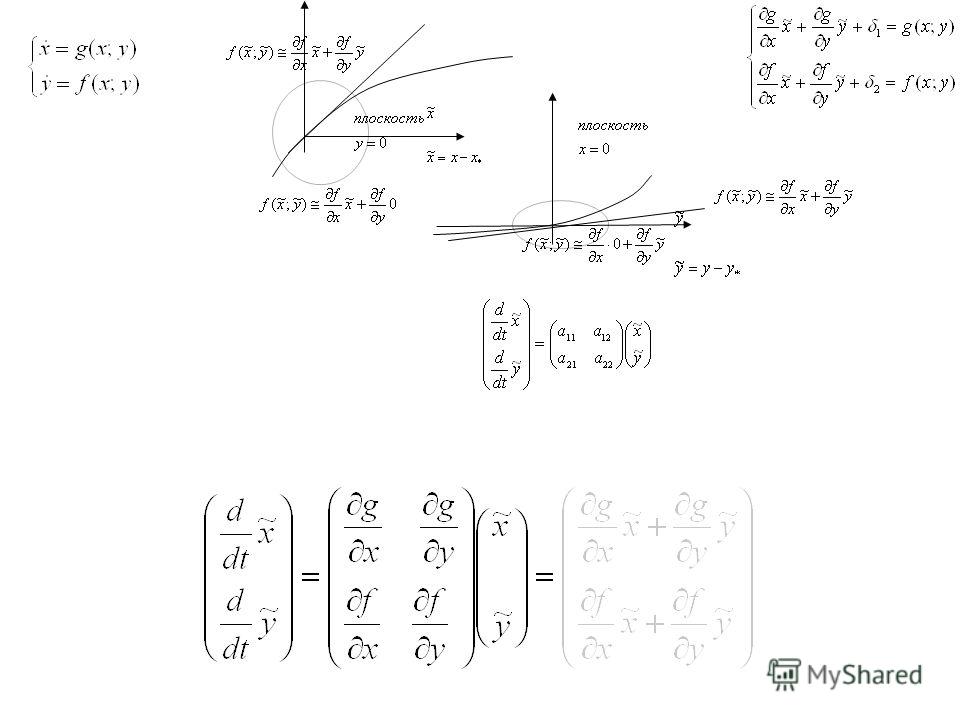
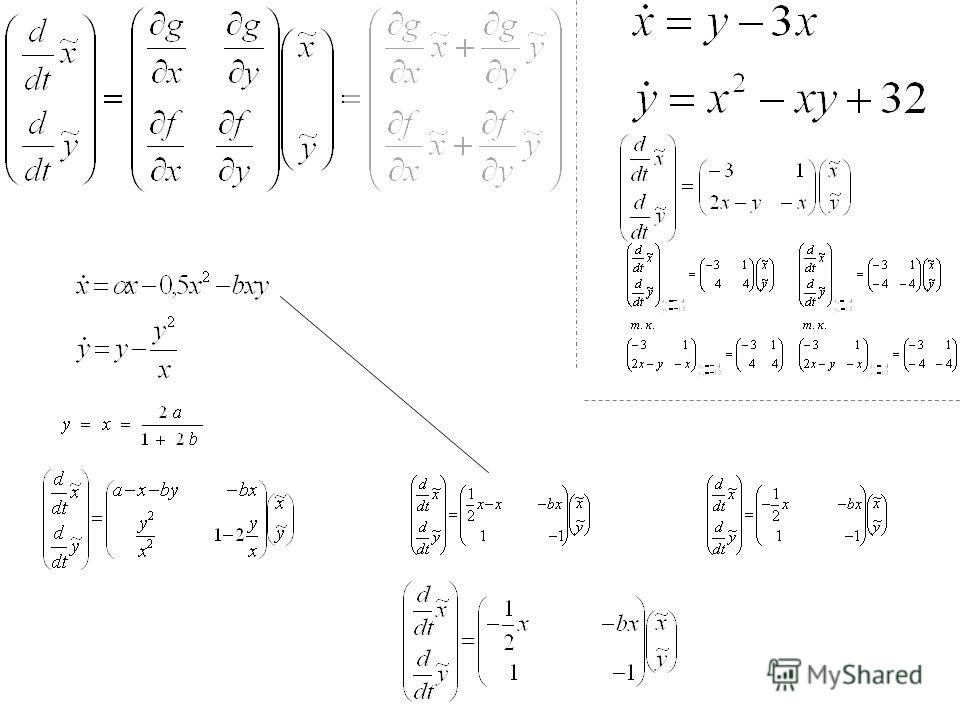
Ищем равновесие В окрестности равновесия Дифференцируем поле

80
Ищем равновесие В окрестности равновесия

81
Ищем равновесие В окрестности равновесия

83
Общий подход

84
решение

85
пример Пусть тогда

86
2-й пример Пусть тогда Пусть х 1 =1 Итого:

87
Одномерная задача

88
Общий подход Единственный случай, когда есть решение ! Уравнения линейно зависимы Решаем пропорцию Характеристический полином:

93
S D сёдла фокусы неуст узлы Уст узлы неустуст

95
Ищем равновесие В окрестности равновесия

97
Формирование народов, языков государств.

98
Без щук Щуки (без учета опосредованных влияний) Щуки с карасями Давление хищника Ландшафт карасей Размерная запись
 Щуки с карасями Давление хищника Ландшафт карасей Размерная запись")
99
Без щук Щуки (без учета опосредованных влияний) Щуки с карасями Давление хищника Ландшафт карасей Размерная запись 1
 Щуки с карасями Давление хищника Ландшафт карасей Размерная запись 1")
100
Без щук Щуки (без учета опосредованных влияний) Щуки с карасями Давление хищника Ландшафт карасей Размерная запись 1 D
 Щуки с карасями Давление хищника Ландшафт карасей Размерная запись 1 D")
101
1

102
1

103
1

104
1

105
1

106
1

108
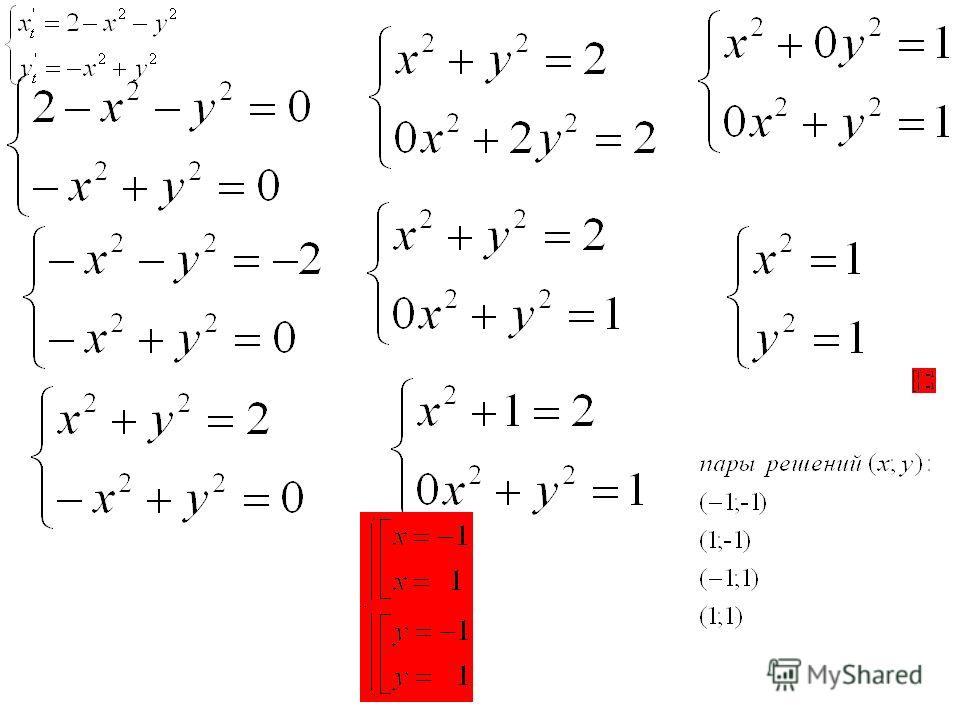
1 1 x y Гл. изоклина - круг Гл. изоклина – пара диаголнальн. прямых Горизонтальная изоклина Вертикальная изоклина

111
1 1 x y

112
1 1 x y Горизонтальная изоклина Вертикальная изоклина Решения – 4 пары

113
S D сёдла фокусы неуст. узлы Уст узлы неуст. уст.

114
В окрестности равновесия 1 1 x y Вертикальная изоклина

115
узел Уст узел Уст.фокус седло Не Уст.фокус S D сёдла фокусы неуст узлы Уст узлы неустуст

116
В окрестности равновесия 1 1 x y Вертикальная изоклина..

117
решение Замена координат

118
Сложение векторов в линейном пространстве y x (3,3) (1,2) (2,1) +
 (1,2) (2,1) +")
119
задачи СЛАУ Методом Гаусса найти обраную матрицу, с использованием её найти решение и проверить подстановкой Решить Методом Гаусса Посчитать разложением по столбцу и Методом Гаусса Классифицировть тип равновесия (исследовать на устойчивость) (посчитать храктерисический многочлен) Лег-ть Дешев Диаг Sums N150 SonyVio HP Pavilion DV7 d 10 5+d/2 10 a-1 a dc a bc ЛПР
 (посчита")
120
Нечто с молоком 200 мл заваренного кофе + 50 мл молока Молоко 90% воды 10% порошка Кофе 4 мл порошка кофе 196 мл воды

121
Решить систему: Х(-1) было стало или
 было стало или")
122
было стало или

123
Метод Гаусса Строковые операции: сложение строк, умножение на число

124
Х(-3) Х(-4) Х(-2.5)
 Х(-4) Х(-2.5)")
125
/5 Х(-3) Х(-4) Х(-2.5)
 Х(-4) Х(-2.5)")
126
С молоком 200 мл заваренного кофе + 50 мл молока Молоко 90% воды 10% порошка Кофе 4 мл порошка кофе 196 мл воды

127
Решение систем линейных уравнений 2 2

128
1 2 2 :2

129
Решение систем линейных уравнений

130
Совместность (разрешимость) систем линейных уравнений
 систем линейных уравнений")
131
проверка Если нужно решить проверка

132
Решить через обр.матрицу. проверка Если нужно решить проверка решение

133
Метод Гаусса (2 х 2)
")
134
Гаусс 3 х 3

135
Простая иерархия 1х3х3 Лёг Дешв Диаг Sums N150 SonyVio HP Pavilion DV Лег-ть Дешев Диаг Sums N150 SonyVio HP Pavilion DV7 d 10 5+d/2 10 a-1 a dc a bc ЛПР Задача ЛПР Лёг Дешв Диаг Sums N150 SonyVio HP Pavilion DV7 0,17 0,45 0, ,5 60 0,45 0,1 0,5 0,3 0,2 ЛПР 150 0,5

136
ЛПР Критерий 1 (К1) 1 Альт-ва 1 (a1) 2 Альт-ва 2 (a2) Критерий 2 (К2) 0,3 0,7 0,3 0,4 0,7 0,6 Верхний уровень Нижний уровень ЛПР K 1 K 2 Верхний уровень Нижний уровень Советник 1 (с1) Советник 2 (с2) a3) Альт-ва 3 (a3) средний уровень ЛПР a 1 a 2 (a1)(a2) (a3) a 3a ,72 0,15 0,13 0,72 0,13 0,15 Ответ: выбираем решение (альтернативу) a1
 1 Альт-ва 1 (a1) 2 Альт-ва 2 (a2) Критерий 2 (К2) 0,3 0,7 0,3 0,4 0,7 0,6 Верхний уровень Нижний уровень ЛПР K 1 K 2 Верхний уровень Нижний уровень Советник 1 (с1) Советник 2 (с2) a3) Альт-ва 3 (a3) средний уровень ЛПР a 1 a 2 (a1")
137
Метод Гаусса (2 х 2)
")
138
ЛПР Критерий 1 (К1) 1 Альт-ва 1 (a1) 2 Альт-ва 2 (a2) Критерий 2 (К2) 0,3 0,7 0,3 0,4 0,7 0,6 Верхний уровень Нижний уровень ЛПР K 1 K 2 Верхний уровень Нижний уровень Советник 1 (с1) Советник 2 (с2) a3) Альт-ва 3 (a3) средний уровень ЛПР a 1 a 2 (a1)(a2) (a3) a 3a ,72 0,15 0,13 0,72 0,13 0,15 Ответ: выбираем решение (альтернативу) a1
 1 Альт-ва 1 (a1) 2 Альт-ва 2 (a2) Критерий 2 (К2) 0,3 0,7 0,3 0,4 0,7 0,6 Верхний уровень Нижний уровень ЛПР K 1 K 2 Верхний уровень Нижний уровень Советник 1 (с1) Советник 2 (с2) a3) Альт-ва 3 (a3) средний уровень ЛПР a 1 a 2 (a1")
139
МатьДруг Качественна я съёмка Регулярна я съёмка Показ снимков Кулешов С.В. CASIO Exilim EX- H5 Olympus Mju 5010 Pentax Optio RZ10 Sony Cyber-shot T99 FUJIFILM FinePix AV180 ZOOMMpix Выдержк а Диагонал ь дисплея 0,2 0,8 0,29 0,14 0,57 0,22 0,67 0,11 0,53 0,27 0,07 0,13 0,14 0,41 0,04 0,41 0,27 0,09 0,55 0,37 0,19 0,05 0,18 0,21 0,31 0,15 0,31 0,08 0,15 0,16 0,47 0,05 0,14 0,29 0,14 0,29

140
Качественна я съёмка Регулярна я съёмка Показ снимков Кулешов С.В. CASIO Exilim EX- H5 Olympus Mju 5010 Pentax Optio RZ10 Sony Cyber-shot T99 FUJIFILM FinePix AV180 ZOOMMpixВыдержа Диагонал ь дисплея 0,24 0,56 0,2 0,53 0,27 0,07 0,13 0,14 0,41 0,04 0,41 0,27 0,09 0,55 0,37 0,19 0,05 0,18 0,21 0,31 0,15 0,31 0,08 0,15 0,16 0,47 0,05 0,14 0,29 0,14 0,29

141
Кулешов С.В. CASIO Exilim EX- H5 Olympus Mju 5010 Pentax Optio RZ10 Sony Cyber-shot T99 FUJIFILM FinePix AV180 ZOOMMpix Выдержка Диагональ дисплея 0,26 0,31 0,15 0,28 0,37 0,19 0,05 0,18 0,21 0,31 0,15 0,31 0,08 0,15 0,16 0,47 0,05 0,14 0,29 0,14 0,29

142
Кулешов С.В. CASIO Exilim EX- H5 Olympus Mju 5010 Pentax Optio RZ10 Sony Cyber-shot T99 FUJIFILM FinePix AV180 0,24 0,16 0,18 0,26 0,16 FUJIFILM FinePix AV180

143
Выбор фотоаппарата МатьДруг Качественна я съёмка Регулярна я съёмка Показ снимков Кулешов С.В. CASIO Exilim EX- H5 Olympus Mju 5010 Pentax Optio RZ10 Sony Cyber-shot T99 FUJIFILM FinePix AV180 ZOOMMpix Выдержк а Диагонал ь дисплея

144
Pentax Optio RZ10 ZOOM: 10х Mpix: 14.1 Размер дисплея: 2.7 Выдержка: 4 - 1/2000 с Olympus Mju 5010 ZOOM: 5х Mpix: 14 Размер дисплея: 2.7 Выдержка: 4 - 1/2000 с CASIO Exilim EX-H5 ZOOM: 10х Mpix: 12.1 Размер дисплея: 2.7 Выдержка: 4 - 1/2000 с FUJIFILM FinePix AV180 ZOOM: 3х Mpix: 14 Размер дисплея: 3 Выдержка: 8 - 1/1400 с Sony Cyber-shot T99 ZOOM: 4.7х Mpix: 14.1 Размер дисплея: 3 Выдержка: 2 - 1/1250 с

145
Кулешов С.В. МатьДруг Мать Друг Регулярная съёмкаКачественная съёмка Регулярная съёмка Показ снимков Качественная съёмка Показ снимков Регулярная съёмка Качественная съёмка Регулярная съёмкаПоказ снимков Качественная съёмка Показ снимков МатьДруг Качественна я съёмка Регулярна я съёмка Показ снимков Кулешов С.В.

146
Регулярная съёмка Mpix ZOOM Mpix Выдержка Mpix Диагональ дисплея ZOOM Выдержка ZOOM Диагональ дисплея Выдержка Диагональ дисплея Качественная съёмка Mpix ZOOM Mpix Выдержка Mpix Диагональ дисплея ZOOM Выдержка ZOOM Диагональ дисплея Выдержка Диагональ дисплея Показ снимков Mpix ZOOM Mpix Выдержка Mpix Диагональ дисплея ZOOM Выдержка ZOOM Диагональ дисплея Выдержка Диагональ дисплея

147
Mpix Pentax Optio RZ10 Olympus Mju 5010 CASIO Exilim EX-H5 FUJIFILM FinePix AV180 Sony Cyber-shot T99 FUJIFILM FinePix AV180 CASIO Exilim EX-H5 Olympus Mju 5010 ZOOM Pentax Optio RZ10 Olympus Mju 5010 CASIO Exilim EX-H5 FUJIFILM FinePix AV180 Sony Cyber-shot T99 FUJIFILM FinePix AV180 CASIO Exilim EX-H5 Olympus Mju 5010

148
Альт. 1 Альт. 2 ЛПР 0,7*0,6+0,7*0,3 =0,63 0,7*0,4+0,3*0,3 =0.37 Альт. 1 Альт. 2ЛПР Критерий 1 Критерий 2 0,3 0,7 0,3 0,4 0,7 0,6 Верхний уровень Нижний уровень

149
Рост фондов Сжатие фондов бум цикл равновесие

150
Динамика (отображения)
")
151
Жёсткая система. кризис Рост фондов Сжатие фондов бум капитал цикл

Еще похожие презентации в нашем архиве:










 Разработчик Гергет О.М.")
















 Векторная величина (Характеризуется.")

