Скачать презентацию
Идет загрузка презентации. Пожалуйста, подождите

1
Компьютерная реализация математических моделей динамических систем

2
Содержание лекции Краткие сведения о дифференциальных уравнениях Интегрирование обыкновенных дифференциальных уравнений и систем дифференциальных уравнений с использованием вычислительного блока Given –Оdesolve Интегрирование обыкновенных дифференциальных уравнений с использованием встроенных функций rkfixed и Rkadapt

3
Определение динамической модели Изменяющиеся во времени процессы в технических системах описываются динамическими математическими моделями Динамические математические модели – это дифференциальные уравнения и системы дифференциальных уравнений. Д ифференциальные уравнения – это уравнения, в которых неизвестными являются функции одной или нескольких переменных

4
Понятие об обыкновенных дифференциальных уравнениях и Дифференциальные уравнения с производными только по одной переменной называются обыкновенными дифференциальными уравнениями;

5
Понятие об уравнениях в частных производных Дифференциальные уравнения, в которые входят производные по нескольким переменным, называются уравнениями в частных производных.

6
Понятие о порядке дифференциального уравнения Дифференциальное уравнение с неизвестной функцией x(t) или система уравнений, в которые входят только первые производные этой функции, называется дифференциальным уравнением или системами первого порядка. Дифференциальные уравнения с неизвестной функцией x(t), в которые входят производные этой функции вплоть до x (n) (t) называется дифференциальным уравнением n-ого порядка
 или система уравнений, в которые входят только первые производные этой функции, называется дифференциальным уравнением или системами первого порядка.")
7
Стандартная форма записи дифференциальных уравнений Дифференциальное уравнение или систему уравнений практически всегда можно привести к стандартной форме Стандартная форма диф. уравнений – это уравнения, разрешенные относительно первой производной Система дифференциальных уравнений в стандартной форме имеет вид x1 = f1(t, x1, x2,......,xn) x2 = f2(t, x1, x2,......,xn) xn=fn(t, x1, x2,......,xn) Решением cистемы уравнений является вектор, обращающий дифференциальные уравнения в тождества

8
Напоминание!!!! Каждое уравнение и каждая система имеют бесконечное множество решений, которые отличаются друг от друга постоянными интегрирования. Чтобы однозначно определить решение, требуется задать дополнительные условия для определения постоянных интегрирования Количество условий должно совпадать с порядком дифференциального уравнения или системы.

9
Виды задач, описываемых дифференциальными уравнениями В зависимости от вида дополнительных условий различают две задачи: – задачи Коши - это обыкновенные дифференциальные уравнения с начальными условиями, в которых задаются е значения функции в начальной точке интервала интегрирования (чаще всего заданы значения функции и ее (n-1) производных при t=0) – краевые задачи – это обыкновенные дифференциальные уравнения с граничными условиями, где задаются значения функции в начале и в конце интервала интегрирования.

10
Возможности интегрирования дифференциальных уравнений в Mathcad Для решения обыкновенных дифференциальных уравнений и систем обыкновенных дифференциальных уравнений в Mathcad предусмотрены две возможности: – вычислительный блок Given – Оdesolve – встроенные функции rkfixed, Rkadapt и др Вычислительный блок Given - Оdesolve применяется как для решения одного уравнения, так и для решения систем уравнений; в рамка этого блока уравнения записываются в привычной форме так, как это принято на листе бумаги. Встроенные функции rkfixed, Rkadapt и др решают дифференциальные уравнения первого порядка или систему из n дифференциальных уравнений первого порядка методом Рунге-Кутты); эти функции для решения требуют приведения уравнений к стандартному виду.

11
Соглашения Mathcad При вводе производных в уравнениях можно использовать как знак производной с панели Calculus, так и символ «штрих», который вводится комбинацией клавиш Ctrl+F7 При вводе производных в начальных условиях необходимо использовать только символ «штрих» комбинацией клавиш Ctrl+F7 Знак равенства при определении начальных условий вставляется комбинацией клавиш Ctrl+ =

12
Правила интегрирования обыкновенных дифференциальных уравнений с использованием вычислительного блока Given –Оdesolve Для решения уравнения или системы уравнений с помощью функции блока Given –Оdesolve требуется : Записать ключевое слово Given; Записать дифференциальное уравнение и начальные или граничные условия для него, либо систему дифференциальных уравнений и ее начальные или граничные условия; Обратиться к функции odesolve ([vector],t,b,[n]), где vector- необязательный параметр, применяющийся только при решении систем уравнений; t имя независимой переменной, b-конечная точка интервала интегрирования, n количество шагов, на которое разбивается интервал интегрирования.

13
Пример. Найти решение обыкновенного дифференциального уравнения первого порядка с начальным условием

14
Решение обыкновенного дифференциального уравнения второго порядка

15
Решение уравнения w*2у"+β*у'+у=0

16
Решение уравнения w2у' '+βу'+у=0 на фазовой плоскости.

17
Интегрирование систем дифференциальных уравнений с использованием блока Given-Odesolve Алгоритм решения системы дифференциальных уравнений с использованием блока Given-Odesolve : 1.внутри вычислительного блока Given записать уравнения 2. записатьи начальные условия; 3.обратиться к функции Odesolve : – первый параметр-массив имен функций; – второй- независимая переменная; – третий - конечная точка интервала интегрирования системы.

18
Пример. Найти решение решения системы двух дифференциальных уравнений, на интервале интегрирования - [0;10] с начальными условиями
![Пример. Найти решение решения системы двух дифференциальных уравнений, на интервале интегрирования - [0;10] с начальными условиями](http://images.myshared.ru/6/685903/slide_18.jpg "Пример. Найти решение решения системы двух дифференциальных уравнений, на интервале интегрирования - [0;10] с начальными условиями")
19
Интегрирование обыкновенных дифференциальных уравнений первого порядка с использованием встроенных функций rkfixed и Rkadapt Функции rkfixed и Rkadapt решают только задачи Коши и реализуют метод Рунге-Кутты четвертого порядка, Функция rkfixed ищет решение с фиксированным шагом Функция Rkadapt проверяет, как быстро изменяется приближенное решение и адаптирует шаг решения.

20
Технология использования функций rkfixed и Rkadapt Чтобы решать уравнения посредством функций rkfixed и Rkadapt, эти уравнения необходимо преобразовать к стандартному виду (разрешить их относительно первой производной): Обращение к этим функциям одинаково: rkfixed (y, t1, t2, m, D), Rkadapt(y, t1, t2, m, D), здесь y – вектор начальных условий, [t1, t2] –начало и конец интервала интегрирования, m-количество промежутков, на которые разбивается интервал [t1, t2], D – вектор правых частей системы дифференциальных уравнений стандартного вида
: Обращение к этим функциям один")
21
Алгоритм интегрирования дифференциального уранения с помощью функций rkfixed и Rkadapt 1.Задать начальные условия 2.Записать дифференциальное уравнение в стандартной форме. 3.Сформировать параметр D в виде правой части уравнения, записанного в стандартном виде. 4.Обратиться к функции Функции rkfixed и Rkadapt возвращают матрицу размером (m+1)*(n+1): нулевой столбец этой матрицы содержит все точки интервала интегрирования [ t1, t2], все остальные столбцы содержат значения найденой функции в этих точках.

22
Пример. Найти решение дифференциального уравнения Преобразуем уравнение к стандартному виду: Обращение к функции rkfixed: с помощью функции rkfixed Задаем начальные условия : Формируем параметр D в виде правой части уравнения, записанного в стандартном виде

23
Пример. Решение системы дифференциальных уравнений x(0)=0, y(0)=0, интервал интегрирования [0,10], с помощью функций rkfixed и Rkadapt m=50
![Пример. Решение системы дифференциальных уравнений x(0)=0, y(0)=0, интервал интегрирования [0,10], с помощью функций rkfixed и Rkadapt m=50](http://images.myshared.ru/6/685903/slide_23.jpg "Пример. Решение системы дифференциальных уравнений x(0)=0, y(0)=0, интервал интегрирования [0,10], с помощью функций rkfixed и Rkadapt m=50")
24
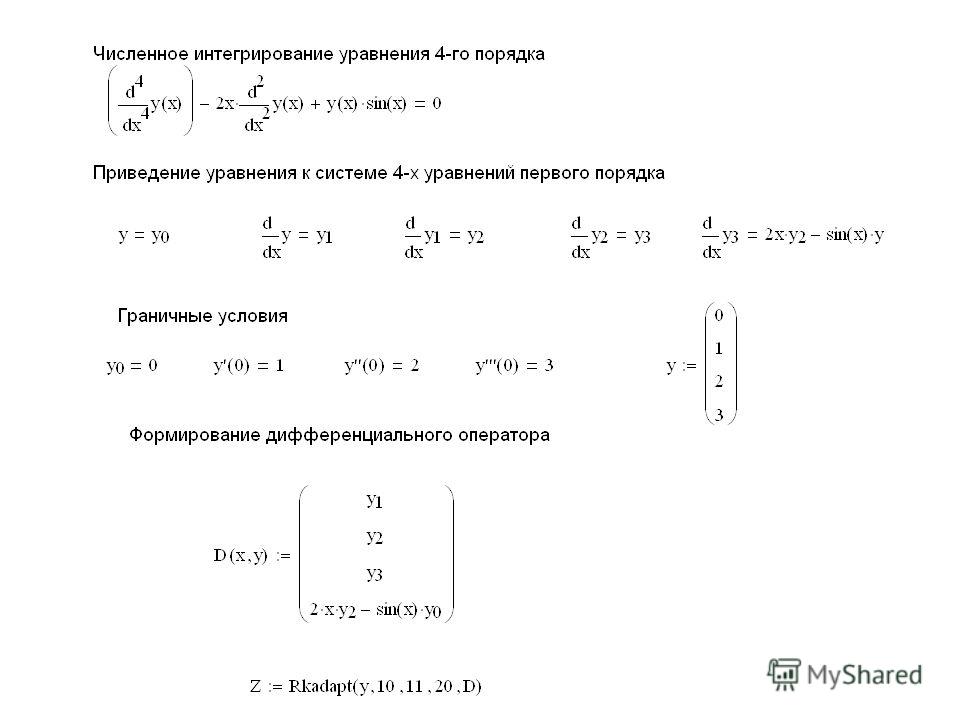
Порядок интегрирования дифференциальных уравнений высокого порядка с использованием функций rkfixed и Rkadapt Для решения дифференциального уравнения n - порядка необходимо: 1.путем подстановок свести это уравнение к n уравнениям первого порядка 2. записать полученные уравнения в стандартном виде. 3.задать вектор начальных условий, который состоит из n элементов, определяющих начальные условия для искомой функции и ее ( n-1) производных 4.сформировать функцию D(t,x), которая в этом случае является вектором, содержащим n элементов; 5.выполнить обращение к функции rkfixed или Rkadapt В результате решения получается матрица, содержащая n столбцов; первый - для значений аргумента, оставшиеся столбцы содержат искомую функцию и ее производные

25
Пример,, y(0)=0, Введем обозначения: В результате исходное уравнение сведется к системе уравнений первого порядка:
=0, Введем обозначения: В результате исходное уравнение сведется к системе уравнений первого порядка:")
26
Вектор начальных условий y0(0)=0, y1(0)=1 Формируем функцию D(t,x), которая в этом случае является вектором, содержащим n элементов: Выполняем обращение к функции Rkadapt Запиыаем систему в стандартном виде
=0, y1(0)=1 Формируем функцию D(t,x), которая в этом случае является вектором, содержащим n элементов: Выполняем обращение к функции Rkadapt Запиыаем систему в стандартном виде")
27
Результаты интегрирования дифференциального уравнения второго порядка

Еще похожие презентации в нашем архиве: