Скачать презентацию
Идет загрузка презентации. Пожалуйста, подождите

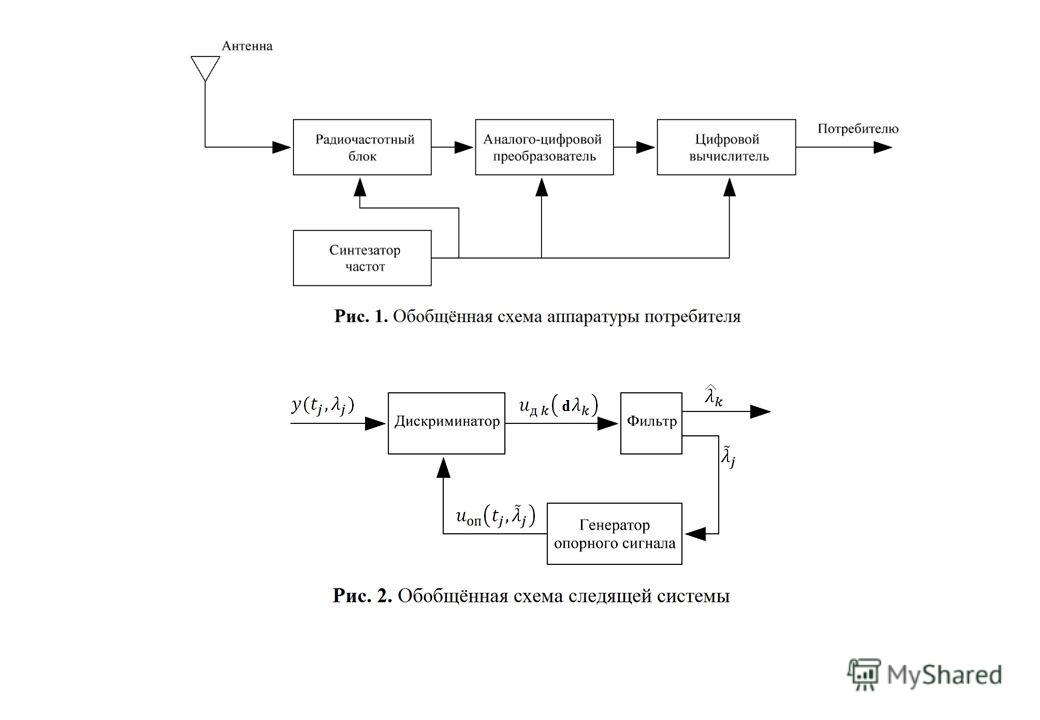
1
ГЛОНАСС

3
Рис. 3. Формирование сигнала ФМ2 Рис. 4. Регистр сдвига генератора ПСП Рис. 5. Результат моделирования сигнала ФМ2

4
(3)(3) (4)(4) (5)(5) Рис. 6. Схема частотного дискриминатора когерентного приёмника
(3) (4)(4) (5)(5) Рис. 6. Схема частотного дискриминатора когерентного приёмника")
5
(6)(7)(8)(9)(6)(7)(8)(9) (10) Рис. 7. Зависимость математического ожидания а) синфазной компоненты от ошибки по частоте; б) квадратурной компоненты от ошибки по частоте. Рис. 8. Результат моделирования
(7)(8)(9)(6)(7)(8)(9) (10) Рис. 7. Зависимость математического ожидания а) синфазной компоненты от ошибки по частоте; б) квадратурной компоненты от ошибки по частоте. Рис. 8. Результат моделирования")
6
Рис. 9. Расчётная ДХ ЧДРис. 10. ДХ ЧД, полученная на модели Рис. 11. Расчётная ДХ ФДРис. 12. ДХ ФД, полученная на модели

7
(11) (12) Рис. 13. Флуктуационная характеристика ЧД(7). Рис. 14. Флуктуационная характеристика ЧД(8).
 (12) Рис. 13. Флуктуационная характеристика ЧД(7). Рис. 14. Флуктуационная характеристика ЧД(8).")
8
(13) (14) (15),, (16) Рис. 15. Модель движения с экспоненциально-коррелированным ускорением (17) (18) Рис. 16. Структурная схема фильтра Калмана,, (19)
 (14) (15),, (16) Рис. 15. Модель движения с экспоненциально-коррелированным ускорением (17) (18) Рис. 16. Структурная схема фильтра Калмана,, (19)")
9
Рис. 17. Зависимости СКО фильтрации параметров сигнала от ускорения; а) при экспоненциально-коррелированной модели движения; б) при модели движения с тремя интеграторами.
 при экспоненциально-коррелированной модели движения; б) при модели движения с тремя интеграторами.")
10
Рис. 18. Структурная схема комбинированной фазо-частотной системы слежения

11
Рис. 19. Переходные процессы в системе с линеаризованным дискриминатором Рис. 20. Переходные процессы в нелинейной системе Рис. 21. Срыв слежения при большой ошибке по частоте

12
Основные результаты: 1) изучен принцип функционирования комбинированной фазо-частотной системы слежения ; 2) составлена подробная модель сигнала, используемого в СРНС ГЛОНАСС; 3) составлено математическое описание всех функциональных блоков, входящих в исследуемую систему; 4) получены модели фазового и частотного дискриминаторов, и их статистические характеристики; 5) разработана модель системы слежения с линеаризованными дискриминаторами, а также нелинейная модель и проведено исследование реакции систем на детерминированные воздействия.
 изучен принцип функционирования комбинированной фазо-частотной системы слежения ; 2) составлена подробная модель сигнала, используемого в СРНС ГЛОНАСС; 3) составлено математическое описание всех функциональных блоков, входящих")
Еще похожие презентации в нашем архиве:



 Кафедра радиотехнических систем Бакалаврская работа РАЗРАБОТКА МАТЕМАТИЧЕСКОЙ МОДЕЛИ СИСТЕМЫ.")






 и системой символьной синхронизации (СССх).")





. Тема 11 Медицинская помощь и лечение (схема 2)")

 Кафедра РТС Тема: Моделирование системы временного сопровождения Выполнил: Куликов И.С. Группа: ЭР-15-07 Научный руководитель: Нагин И.А. Москва,")

