Скачать презентацию
Идет загрузка презентации. Пожалуйста, подождите

1
Интеллектуальные системы в Машиностроении. Применение нечеткой логики в системах автоматического Управления. Все данные взяты с сайта Выполнили студенты ВМ-40 Дорофеев А., Гумеров А., Валиев Д., Матвеев С.

2
Этапы обработки информации при использовании нечеткой логики: Нечеткие рассуждения – на основе фаззификации – преобразование численного значения в символьное нечеткое значение Четкое принятие решения – дефаззификация – преобразование нечеткого символьного значения в число

3
Структура системы управления на основе нечеткой логики

5
Общая структура адаптивной системы управления с использованием нечеткой логики

6
Пример нечеткого логического вывода

7
Пример лингвистической переменной

8
Особенности нечеткой логики (fuzzy logic): В нечеткой логике точные рассуждения рассматриваются как частный случай нечетких рассуждений В нечеткой логике нечто является чем-то определенным только в какой-то степени В нечеткой логике знание интерпретируется как набор гибких или нечетких ограничений на наборе нечетких переменных Вывод рассматривается как процесс распространения нечетких ограничений Любая логика может быть фаззифицирована.
: В нечеткой логике точные рассуждения рассматриваются как частный случай нечетких рассуждений В нечеткой логике нечто является чем-то определенным только в какой-то степени В нечеткой логике знание интерпрети")
9
Какая разница между нечеткой логикой и обычными методами управления? Нечеткая логика вводит простой, основанный на правилах вида IF X AND Y THEN Z подход к решению проблемы управления вместо попыток смоделировать систему математически. Нечеткая логика основана на эмпирике (опыте) оператора, а не на понимании внутренностей системы. Например, вместо того, чтобы оперировать такими высказываниями с температурой как "SP =500F", "T

10
Как нечеткая логика работает? Нечеткая логика использует некоторые численные параметры для того, чтобы оценивать ошибку и скорость изменения ошибки, Но точные значения этих величин обычно не требуется. Например, простая система управления температурой может использовать один датчик, показания которого вычитаются из управляющего сигнала для вычисления ошибки и затем происходит дифференциация по времени для вычисления скорости изменения ошибки. Эти величины не должны быть симметричными и могут быть настроены для лучшего представления поведения при управлении. Обычно нечеткая логика позволяет системе работать с первого раза без всякой настройки.

11
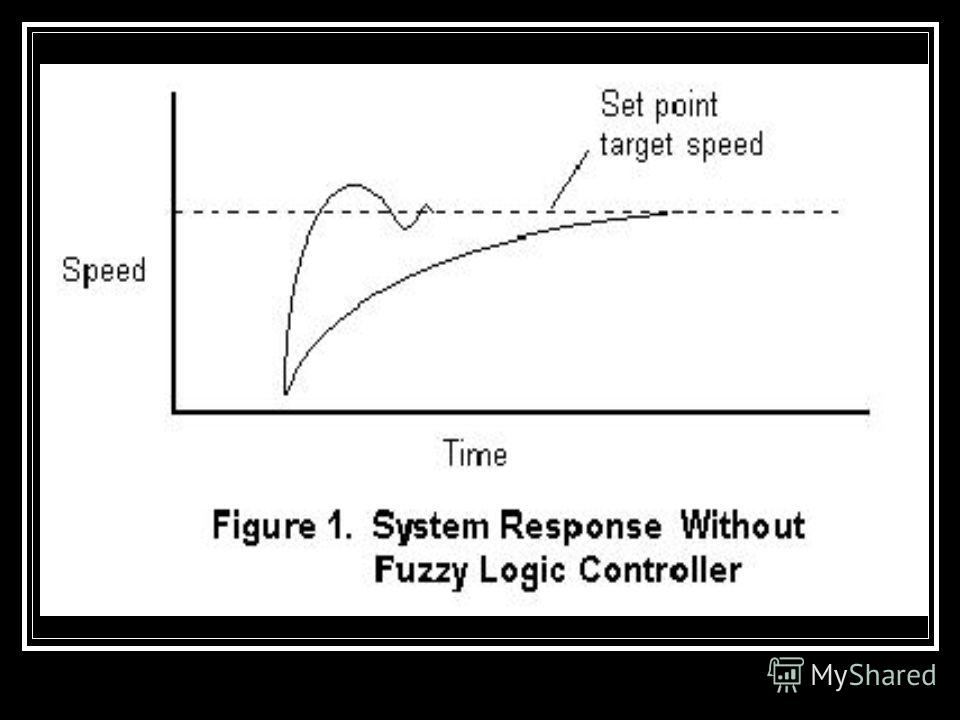
Первый в мире Fuzzy Logic Controller В Англии в 1973 в University of London, профессор Mamdani и студент S. Assilian пытались стабилизировать скорость маленького парового двигателя, построенного студентом. Они имели оборудование для этого – мини-ЭВМ PDP-8 и обычные средства для цифрового управления. Но они не могли управлять двигателем как им хотелось. Наблюдалось перерегулирование и требуемая скорость достигалась только после серии колебаний, т.е. управление скоростью было очень медленным

13
Применив нечеткую логику они получили лучшие результаты

14
Для того, чтобы получить fuzzy logic control system на персональном компьютере, необходимо: Определить входы. Описать состояния и действия системы с помощью нечетких правил на естественном языке. Написать программу для выполнения этих правил над всеми входами и для определения выходов. В программе используется взвешенное среднее для объединения разных действий, вызванных разными правилами, в одно действие управляемой системы. (В случае, если имеется только один выход, объединения не требуется).

15
Конец Спасибо за внимание

Еще похожие презентации в нашем архиве:












. Условный оператор в полной форме записывается.")






")

