Скачать презентацию
1
Григорьева Г. В., Надырова И.М. МЕХАНИКА ТЕОРИЯ МЕХАНИЗМОВ И МАШИН

2
1 ОСНОВНЫЕ ПОНЯТИЯ МЕХАНИЗМОВ И МАШИН 1.1 Основные определения Машина

3
Механизм Передаточное число механизма Звенья Стойка

6
Кинематическая цепь Кинематическая пара Кинематическое звено

7
Классификация кинематических пар в зависимости от числа условий связи 1.2. Классификация кинематических пар

8
Классы кинематических пар Рис. 4. Классы кинематических пар

10
Классификация кинематических пар по роду относительного движения звеньев Поступательная пара Вращательная пара Вращательная кинематическая пара

11
Классификация кинематических пар по характеру соприкосновения элементов пары Низшие кинематические пары

13
а) контакт по линии или в точке (кулачок с толкателем) б) два зуба контактируют по линии (зубчатое зацепление)
 контакт по линии или в точке (кулачок с толкателем) б) два зуба контактируют по линии (зубчатое зацепление)")
14
Классификация кинематических пар по способу замыкания

15
2. СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМОВ 2.1. Задачи структурного анализа механизмов W=6n-5p 5 - 4p 4 - 3p 3 - 2p 2 – p 1

16
2.2. Определение степени подвижности плоского механизма

17
2.3. Особенности структурного анализа механизма с высшими кинематическими парами Преобразование расчётной схемы плоского механизма (замена высшей пары низшими)
")
18
Пример

19
2.3.2 Частные случаи замены высших пар низшими

20
2.4. Преобразование расчётной схемы плоского механизма (устранение избыточных связей и лишних степеней свободы)
")
21
Схемы кулачкового механизма б) а) Рис. 15. Схема механизма: а) без лишних степеней свободы; б) с лишней степенью свободы
 а) Рис. 15. Схема механизма: а) без лишних степеней свободы; б) с лишней степенью свободы")
22
2.5. Порядок структурного анализа плоского механизма Определение степени подвижности механизма Выделение структурных групп механизма Выделение механизма I класса Определение класса и порядка механизма

23
Группа Ассура

24
2.6. Классификация механизмов

25
Пример. Выполнить структурный анализ шарнирного механизма (рис. 19).
.")
26
Плоский шарнирный механизм Рис. 20. Структурные схемы плоского шарнирного механизма: а) с ведущим звеном AB; б) с ведущим звеном DE а)а) б)б)
 с ведущим звеном AB; б) с ведущим звеном DE а)а) б)б)")
27
1. Ведущее звено-АВ (рис. 20, а)(рис. 20, а) Степень подвижности механизма Структурные группы механизма
(рис. 20, а) Степень подвижности механизма Структурные группы механизма")
28
2. Ведущее звено-DE (рис. 20, б)(рис. 20, б) Степень подвижности механизма Структурные группы механизма
(рис. 20, б) Степень подвижности механизма Структурные группы механизма")
29
2.7. Основные виды плоских рычажных механизмов

30
3. КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМОВ 3.3. Планы положений механизма 3.4. Планы скоростей плоских механизмов 3.6. Планы ускорений плоских механизмов 3.8. Определение скоростей и ускорений структурных групп3.8. Определение скоростей и ускорений структурных групп 3.9. Аналоги скоростей и ускорений Графическое дифференцирование и интегрирование как методы кинематического анализа3.10. Графическое дифференцирование и интегрирование как методы кинематического анализа Кинематическое исследование механизмов методом диаграмм3.11. Кинематическое исследование механизмов методом диаграмм Аналитические методы

31
3.3. Планы положений механизма Пример 1. Шарнирный четыр ё хзвенник (рис. 22). Рис. 22. Построение плана положений шарнирного четырёхзвенника
. Рис. 22. Построение плана положений шарнирного четырёхзвенника")
32
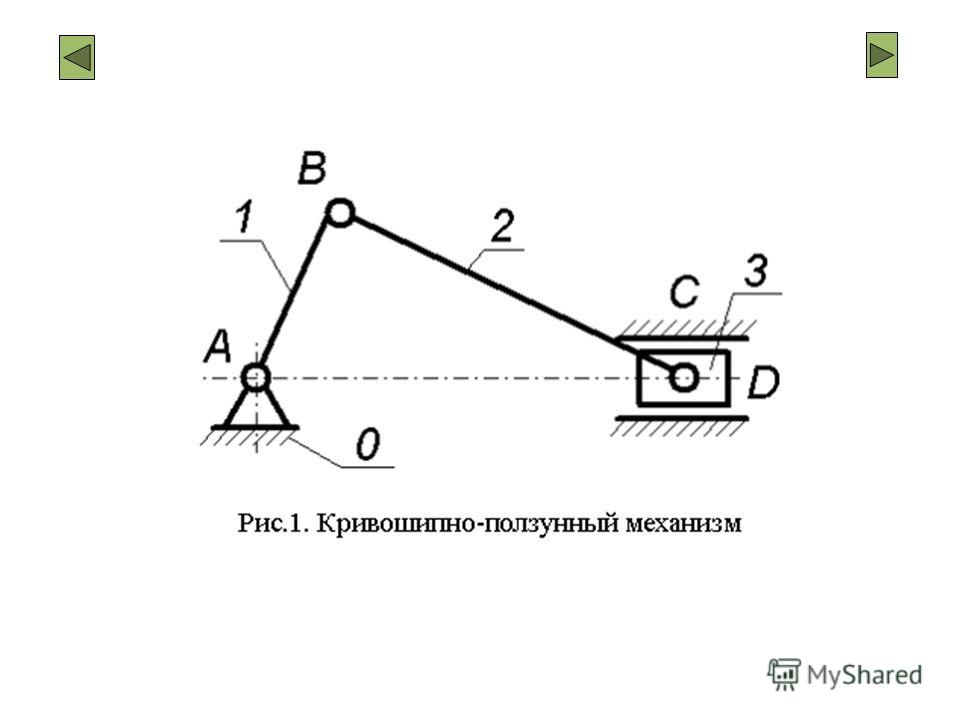
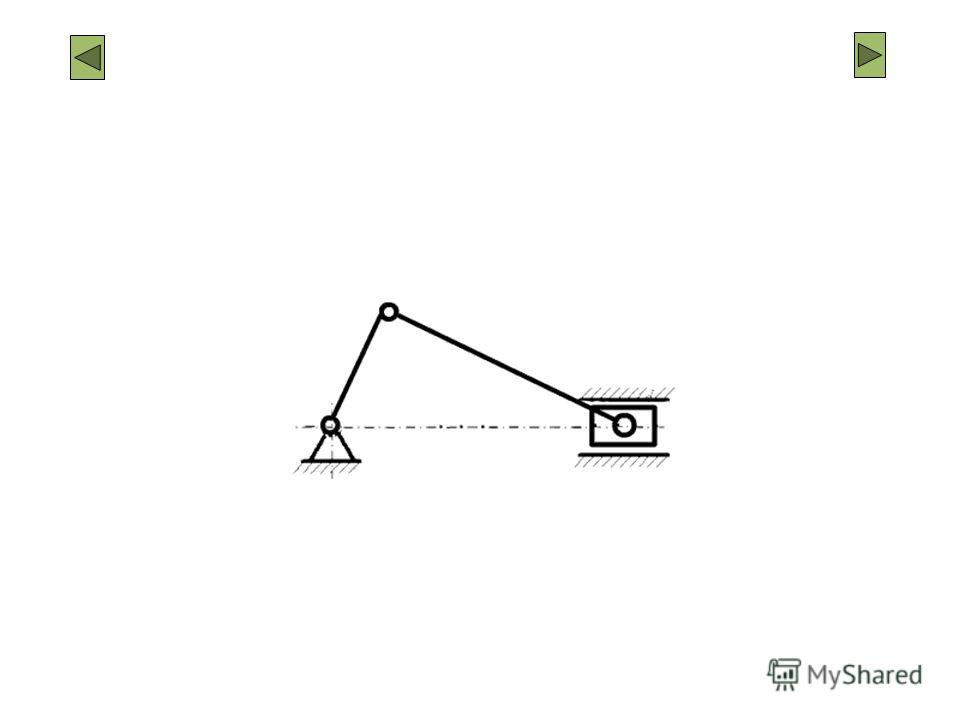
Пример 2. Кривошипно-ползунный механизм (рис. 23).
.")
33
3.4. Планы скоростей плоских механизмов Задача 1. Определение скоростей точек звена, входящего во вращательную пару с другим звеном. Дано: – вектор скорости точки А; ω BA – угловая скорость звена АВ, размеры звеньев. Определить: скорости точек В и С ( и ) (рис. 24, а). а)б) Рис. 24. Построение плана скоростей точек звена, входящего во вращательную пару pvpv a b c

34
(3.1) (3.2) (3.3) (3.4) (3.5) (3.6) (3.7) (3.8)
 (3.2) (3.3) (3.4) (3.5) (3.6) (3.7) (3.8)")
35
Дано: ω AO – угловая скорост ь звена О А; – скорость звена АВ относительно направляющей x-x. Задача 2. Определение скоростей точек звена, входящего в поступ ательную пару (Рис 25).Рис 25 Рис 25. Построение плана скоростей точек звена, входящего в поступ ательную пару. R 1 (b) a axax Определить: скорость точ ки A ( ), лежащей на звене АВ (рис. 25).
.Рис 25 Рис 25. Построение плана скоростей точек звена, входящего в пос")
36
(3.9) (3.10) (3.11) (3.12) (3.13)
 (3.10) (3.11) (3.12) (3.13)")
37
3.6. Планы ускорений плоских механизмов Задача 1. Определение у ско рени й точек звена, входящего во вращательную пару с другим звеном. Дано: план скоростей механизма для данного положения (см. рис. 25);см. рис. 25 угловая скорость звена АО - ω АО =const; угловая скорость звена АBC – ω BA ; угловое ускорение звена АBC – ε BA ; Размеры всех звеньев (рис. 26). Определить: у скор ения точек А, В и С (,, )
;см. рис. 25 угловая скорость звена АО - ω АО =c")
38
Рис. 26. Построение плана ускорений точек звена, входящего во вращательную пару

39
Абсолютное ускорение точки B Ускорение точки А

40
Уравнения для точки С Полные относительные ускорения

41
Дано: размеры звеньев (тис. 27); угловая скорост ь звена О А- ω AO const ; ε AO = ε xx – угловое у скор ение звена О А; угловая скорост ь звена AB - ω AB. Задача 2. Определение у скор ени й точек звена, входящего в поступ ательную пару (Рис 27). Определить: у скор ение точ ки А звена AB - P ν (b) axax a
; угловая скорост ь звена О А- ω AO const ; ε AO = ε xx – угловое у скор ение звена О А; угловая скорост ь звена AB - ω AB. Задача 2. Определение у скор ени й точек звена, входящего в поступ ательную пару (Рис 27). Опре")
42
(3.27) (3.28) P a (b) n (3.29) axax (3.31) (3.30) (3.32) r (3.33) a (3.34)
 (3.28) P a (b) n (3.29) axax (3.31) (3.30) (3.32) r (3.33) a (3.34)")
43
3.8. Определение скоростей и ускорений структурных групп Группа Ассура 1-го вида Задача 1. Построение плана скоростей. Дано: скорости точек и (рис.28, а). Рис. 28. Построение плана скоростей структурной группы 1-го вида Определить: скор ости точек,, ; угловые скорости звеньев ω AB, ω BC.
. Рис. 28. Построение плана скоростей структурной группы 1-го вида Определить: скор ости т")
44
(3.35) (3.36) (3.37) (3.38) a с b d PνPν e Рис. 28, б
 (3.36) (3.37) (3.38) a с b d PνPν e Рис. 28, б")
45
Задача 2. Построение плана ускорений. Дано: ускорения точек и (рис.29, а). Скорости известны (рис. 28, б).рис. 28, б Рис. 29. Построение плана ускорений структурной группы 1-го вида Определить: у скор ения точек,, ; угловые ускорения звеньев ε AB, ε BC.
. Скорости известны (рис. 28, б).рис. 28, б Рис. 29. Построение плана ускорений структурной группы 1-го вида Определить: у скор ения точек,, ; угловые ускорения звеньев ε AB, ε")
46
(3.39) (3.40) a с b d PaPa e Рис. 29, б n n1n1
 (3.40) a с b d PaPa e Рис. 29, б n n1n1")
47
Группа Ассура 2- го вида Рис. 30. Построение плана скоростей и ускорений структурной группы 2-го вида. а) план механизма Пример. Дано: кинематическая схема механизма; угловая скорость кривошипа ω ОА. Определить: скор ость и ускорение точ ки B, угловую скорость и угловое ускорение звена AB.
 план механизма Пример. Дано: кинематическая схема механизма; угловая скорость кривошипа ω ОА. Определить: скор ость и ускорение точ ки B,")
48
Рис. 30, б. План скоростей a PνPν BA b

49
Рис. 30, в. План ускорений a BA bPaPa n xx

50
Группа Ассура 3- го вида Рис. 31. Построение плана скоростей и ускорений структурной группы 3-го вида. а) план механизма Пример. Дано: кинематическая схема механизма; угловая скорость кривошипа ω АB. Определить: скор ость и ускорение точ ки B' и D кулисы; угловую скорость и угловое ускорение кулисы.
 план механизма Пример. Дано: кинематическая схема механизма; угловая скорость кривошипа ω АB. Определить: скор ость и ускорение точ ки B'")
51
Рис. 31, б. План скоростей d PνPν DC b b'b'

52
Рис. 31, в. План ускорений b PaPa n k DC с b'b' d

53
3.9. Аналоги скоростей и ускорений Аналог скорости Аналог ускорения точки (3.41) (3.42) (3.43) (3.44) (3.45)
 (3.42) (3.43) (3.44) (3.45)")
54
Аналог угловой скорости Аналог углового ускорения (3.46) (3.47) (3.48)
 (3.47) (3.48)")
55
3.10. Графическое дифференцирование и интегрирование как методы кинематического анализа P H A α

56
Проведём из точки Р на рис. 32 (3.49) (3.50) (3.51) (3.52) (3.53)
 (3.50) (3.51) (3.52) (3.53)")
57
3.11. Кинематическое исследование механизмов методом диаграмм

58
Последовательность графического дифференцирования H P a'a' b'b' c'c' d'd' e'e' f ' i y1y1 (3.54)
")
59
Последовательность графического интегрирования (3.55) Рис a'a' b'b' a1a1 b1b1 c1c1 3 d1d1 4 e1e1 f1f1 5 6 c'c' e'e' f ' P H S0S0 a b c de f g (3.56)
 Рис. 34 1 2 a'a' b'b' a1a1 b1b1 c1c1 3 d1d1 4 e1e1 f1f1 5 6 c'c' e'e' f ' P H S0S0 a b c de f g (3.56)")
60
3.12. Аналитические методы кинематического исследования механизмов

61
Дано: ω – угловая скорость кривошипа; r –длина кривошипа; l -длина шатуна; а – дезаксиал (смещение осей). Пример. Определить: перемещение, скорость, у скор ение точ ки B. (3.57) (3.58) (3.59)
. Пример. Определить: перемещение, скорость, у скор ение точ ки B. (3.57) (3.58) (3.59)")
62
(3.60) (3.61) (3.62) (3.63)
 (3.61) (3.62) (3.63)")
63
(3.64) (3.65) (3.66) (3.67) (3.68)
 (3.65) (3.66) (3.67) (3.68)")
64
4. ДИНАМИЧЕСКИЙ АНАЛИЗ ПЛОСКИХ МЕХАНИЗМОВ 4.4. Определение сил инерции4.4. Определение сил инерции 4.5. Условие статической определимости кинематической цепи4.5. Условие статической определимости кинематической цепи 4.6. Силовой расчёт структурных групп4.6. Силовой расчёт структурных групп 4.7. Определение уравновешивающей силы методом Жуковского4.7. Определение уравновешивающей силы методом Жуковского

65
4.4. Определение сил инерции (4.1) (4.2) Дано: m; J S ; ε=0. Решение: F и= - ma s ;M и =-J s · ε=0
 (4.2) Дано: m; J S ; ε=0. Решение: F и= - ma s ;M и =-J s · ε=0")
66
1. Вращательное движение с постоянной угловой скоростью уравновешенного звена Дано: m; J S ; ε=0; a s =0. Решение: F и= - ma s =0; M и =-J s · ε=0

67
2. Вращательное движение с переменной угловой скоростью уравновешенного звена Дано: m; J S ; ε; a s =0. Решение: F и= - ma s =0; M и =-J s · ε.

68
3. Вращательное движение с переменной угловой скоростью неуравновешенного звена

69
Дано: m; J S = mp²; a s ; h – плечо силы; ρ- радиус инерции. (4.3) Решение: F и= - ma s ; M и =-J s · ε. (4.4)
 Решение: F и= - ma s ; M и =-J s · ε. (4.4)")
70
Определение сил инерции при сложном движении 1. Метод приведения к одной силе S KT A B Рис. 40а. К методу приведения к одной силе Дано: m; J S и план ускорений. Решение:

71
2. Метод приведения к силе и моменту Рис. 40б. К методу приведения к силе и моменту

72
4.5. Условие статической определимости кинематической цепи (4.5) (4.6) (4.7)
 (4.6) (4.7)")
73
Дано:,, M 2, M 3 – внешние силы и моменты пар сил (в том числе силы инерции), приложенные к звеньям 2 и 3. Определить:,, - реакции в кинематических парах Силовой расчёт структурных групп Силовой расчёт группы 1-го вида а)а) B A C F3F3 M3M3 M2M2 F2F2 2 3 а F 12 F2F2 б) F 32 b c F 12 F2F2 F3F3 F 43 Рис. 42. Силовой анализ структурной группы 1- го вида а) расчётная схема; б) план сил
, приложенные к звеньям 2 и 3. Определить:,, - реакции в кинематических парах. 4.6. Силовой расчёт структурных групп 4.6.1. Силовой расчёт группы 1-го вида а)а) B A C F3F3 M3")
74
Уравнение равновесия звена 2 относительно точки B Уравнение равновесия звена 3 относительно точки B Уравнение равновесия для всей группы (4.7) (4.8) (4.9) (4.10) (4.11) Уравнение равновесия звена 2 (4.12)
 (4.8) (4.9) (4.10) (4.11) Уравнение равновесия звена 2 (4.12)")
75
Дано:,, M 2, M 3 – внешние нагрузки, действующие на звенья 2 и 3. Определить:,,, h - реакции в кинематических парах и точку приложения реакции в поступательной паре Силовой расчёт группы 2-го вида а)а) B 3 а б) Рис. 43. Силовой анализ структурной группы 2- го вида а) расчётная схема; б) план сил; в) распределение реакций в поступательной паре. А F2F2 F3F3 M2M2 M3M3 2 xx C h F 43 F2F2 F3F3 b F 32 F 12 в) F 43 F 43 M hFhF l
а) B 3 а б) Рис. 43. Силовой анализ структу")
76
Уравнение равновесия звена 2 Уравнение равновесия всей группы Уравнение равновесия звена 2 (4.13) (4.14) (4.15) (4.18) Из уравнения равновесия звена 3 (4.16) (4.17) (4.19)
 (4.14) (4.15) (4.18) Из уравнения равновесия звена 3 (4.16) (4.17) (4.19)")
77
Силовой расчёт начального звена Рис. 45. Силовой анализ начального звена: а) расчётная схема при передаче энергии через редуктор; б) план сил; в) при передаче энергии через муфту. (4.26) (4.27)
 расчётная схема при передаче энергии через редуктор; б) план сил; в) при передаче энергии через муфту. (4.26) (4.27)")
78
4.7. Определение уравновешивающей силы методом Жуковского Рис. 46. К выводу теоремы Жуковского: а) расчётная схема; б) план скоростей б) hihi FiFi S a b φ PvPv (4.28) (4.29) (4.30) (4.31) (4.32) (4.33) (4.34)
 расчётная схема; б) план скоростей б) hihi FiFi S a b φ PvPv (4.28) (4.29) (4.30) (4.31) (4.32) (4.33) (4.34)")
79
5. СИЛЫ ТРЕНИЯ В МЕХАНИЗМАХ 5.1. Виды трения5.1. Виды трения 5.2. Угол трения и коэффициент трения5.2. Угол трения и коэффициент трения 5.3. Силовой анализ с учётом сил трения5.3. Силовой анализ с учётом сил трения 5.4. Трение качения5.4. Трение качения 5.5. Коэффициент полезного действия механизмов

80
5.1. Виды трения (5.1) (5.2)
 (5.2)")
81
5.2. Угол трения и коэффициент трения Рис. 48. Соотношение между внешними силами и силами трения (5.3)(5.4) (5.5) (5.6) (5.7)
(5.4) (5.5) (5.6) (5.7)")
82
5.3. Силовой анализ с учётом сил трения Трение в поступательной паре Рис. 49. Соотношение сил в поступательной паре (5.8)
")
83
Трение во вращательной паре Рис. 50. Соотношение сил во вращательной паре (5.9) (5.10) (5.11) (5.12)
 (5.10) (5.11) (5.12)")
84
Трение в винтовой паре (5.13) (5.14) (5.16) (5.15)
 (5.14) (5.16) (5.15)")
85
5.4. Трение качения (5.17) (5.18) (5.19) (5.20)
 (5.18) (5.19) (5.20)")
86
5.5. Коэффициент полезного действия механизма (5.21) (5.22)
 (5.22)")
88
7. Синтез передаточных механизмов. Простые зубчатые механизмы 7.2. Классификация зубчатых механизмов7.2. Классификация зубчатых механизмов 7.3. Основная теорема зацепления7.3. Основная теорема зацепления 7.4. Эвольвента и её свойства7.4. Эвольвента и её свойства 7.5. Эвольвентное зацепление7.5. Эвольвентное зацепление 7.7. Методы изготовления зубьев 7.8. Изготовление зубчатых колёс методом обкатки 7.9. Определение размеров зубчатых колёс Виды зацепления двух зубчатых колёс Основные факторы зацепления Корригирование зубчатых колёс Особенности внутреннего зацепления Свойства внутреннего зацепления Особенности конического зацепления Свойства конического зацепления

89
- цилиндрические 7.2. Классификация зубчатых передач

90
- конические - винтовые

91
7.3. Основная теорема зацепления

92
Следствие 1 Числа зубьев

93
при отставание внедрение

94
7.4. Эвольвента и её свойства (7.3) Инволюта угла α x
 Инволюта угла α x")
95
7.5. Эвольвентное зацепление

96
7.7. Методы изготовления зубьев

97
7.8. Изготовление зубчатых колёс методом обкатки

100
Модуль зацепления

101
Исходный контур инструментальной рейки

102
Способы обработки зубьев при методе обкатки Рис. 79а. Накатка с радиальной подачей

103
Рис. 79б. Пакетная накатка с протягиванием

104
Рис. 79в. Накатка с двумя рейками

105
Установка рейки при нарезании зубчатых колёс Рис. 80а. Положение зубчатой рейки без смещения ξ = 0

106
Рис. 80б. Положение зубчатой рейки с положительным смещением b = ξm > 0

107
Рис. 80в. Положение зубчатой рейки с отрицательным смещением b = ξm < 0

108
7.9. Определение размеров зубчатых колёс Определение толщины зуба по дуге делительной окружности (7.6) (7.7) (7.5)
 (7.7) (7.5)")
109
Определение толщины зуба на любом радиусе Рис. 81. К определению толщины зуба на любом радиусе

110
(7.8) (7.9)
 (7.9)")
111
Определение угла зацепления Рис. 82. К определению угла зацепления

112
(7.10) (7.11) (7.12) (7.13)
 (7.11) (7.12) (7.13)")
113
Определение радиуса окружности выступов (7.14) (7.15)
 (7.15)")
114
7.10. Виды зацеплений двух зубчатых колёс 1. Нулевое зацепление 2. Смещённо-нулевое зацепление 3. Смещённое зацепление

116
7.11. Основные факторы зацепления Рис. 82. К определению коэффициентов скольжения и удельного давления

118
Шаг по основной окружности Дуга зацепления

119
Коэффициент перекрытия (7.16)
")
120
Коэффициент скольжения (7.17) Для эвольвентных колёс
 Для эвольвентных колёс")
121
Коэффициент удельного давления Для эвольвентных колёс (7.18) Коэффициент удельного давления Для зубчатых колёс
 Коэффициент удельного давления Для зубчатых колёс")
122
7.12. Корригирование зубчатых колёс Цепи корригирования Рис. 84. Устранение подрезания зубьев

123
Устранение подрезания зубьев (7.19) (7.20)(7.21) (7.22) ( Для основного стандарта 17 ) - Для укороченных зубьев 14 ( ) -
 (7.20)(7.21) (7.22) ( Для основного стандарта 17 ) - Для укороченных зубьев 14 ( ) -")
124
Рис. 85. Блокирующие контуры

125
7.13. Особенности внутреннего зацепления Рис. 86. Внутреннее зацепление (7.23)
")
127
7.14. Свойства внутреннего зацепления (7.24) (7.25) Таблица 1
 (7.25) Таблица 1")
128
7.15. Особенности конического зацепления Рис. 87. Коническое зацепление (7.26)
")
129
(7.27) (7.28) Рис. 88. К определению передаточного отношения конического зацепления
 (7.28) Рис. 88. К определению передаточного отношения конического зацепления")
130
7.16. Свойства конического зацепления то Если,

131
8. Сложные зубчатые механизмы 8.2. Сложные зубчатые механизмы с неподвижными осями8.2. Сложные зубчатые механизмы с неподвижными осями 8.3. Сложные зубчатые механизмы с подвижными осями8.3. Сложные зубчатые механизмы с подвижными осями 8.4. Определение передаточных отношений простых планетарных механизмов8.4. Определение передаточных отношений простых планетарных механизмов 8.5. Подбор чисел зубьев простых планетарных механизмов8.5. Подбор чисел зубьев простых планетарных механизмов 8.6. Планы линейных и угловых скоростей планетарных механизмов8.6. Планы линейных и угловых скоростей планетарных механизмов

132
8.2. Сложные зубчатые механизмы с неподвижными осями Рис. 89. Сложный зубчатый механизм с неподвижными осями

133
(8.1) Таблица 1 Минимальное число зубьев шестерни
 Таблица 1 Минимальное число зубьев шестерни")
134
Рис. 90. Сложный зубчатый механизм с неподвижными соосными осями

135
(8.2) (8.3) (8.4)
 (8.3) (8.4)")
136
8.3. Сложные зубчатые механизмы с подвижными осями Рис. 91. Механизмы с подвижной осью а) W = 2; б) W = 1 а) б)
 W = 2; б) W = 1 а) б)")
137
Пример. Известны ω 1, ω 2, ω 3, ω 4, z 1, z 2, z 3, z 4. (8.5) (8.6)
 (8.6)")
138
Рис. 92. Простые планетарные механизмы: а) - механизм; б) AJ-механизм; в) AA-механизм; г) JJ-механизм а) б) в) г)
 - механизм; б) AJ-механизм; в) AA-механизм; г) JJ-механизм а) б) в) г)")
142
8.4. Определение передаточных отношений простых планетарных механизмов Планетарный однорядный - механизм Рис. 93. Графический способ определения передаточного отношения - механизма

144
Аналитический способ определения передаточного отношения (8.7) (8.8) (8.9)
 (8.8) (8.9)")
145
8.5. Подбор чисел зубьев простых планетарных механизмов Уравнение передаточного отношения (8.18)
")
146
Условие соседства Рис. 97. К определению условия соседства (8.19)
")
147
Рис. 98. К определению условия сборки (8.20)
")
148
8.6. Планы линейных и угловых скоростей планетарных механизмов Рис. 99. Построение планов скоростей и ускорений (8.21)
")
149
9. Винтовые зубчатые механизмы

150
Рис Образование винтовых зубьев а) б) (9.1) (9.2)
 б) (9.1) (9.2)")
151
Рис К определению зависимости 9.3. (9.3)
")
152
Рис Зацепление двух винтовых зубчатых колёс при одинаковом направлении наклона зубьев

153
Рис Зацепление двух винтовых зубчатых колёс при разном направлении наклона зубьев (9.4) (9.5)
 (9.5)")
154
Рис К определению силы P H (9.6) (9.7)
 (9.7)")
155
10. Чевячные механизмы (рис. 101, б) а) S ВЛ = 2P a б) S BЛ = z 1 P a (10.1) (10.2)
 а) S ВЛ = 2P a б) S BЛ = z 1 P a (10.1) (10.2)")
156
δ = π/2 а) б) Рис Червячный механизм
 б) Рис. 107. Червячный механизм")
157
Для червяка: Для червячного колеса: (10.3) 2 γ = 60÷110°
 2 γ = 60÷110°")
158
11. Волновая передача Рис Волновая зубчатая передача

159
(11.2) (11.3) (11.4) (11.1) Z 2 - Z 1 = 2
 (11.3) (11.4) (11.1) Z 2 - Z 1 = 2")
160
12. Кулачковые механизмы Кинематический анализ кулачковых механизмов12.1. Кинематический анализ кулачковых механизмов Законы движения ведомого звена12.2. Законы движения ведомого звена Определение действительного угла передачи12.3. Определение действительного угла передачи Динамический синтез кулачкового механизма12.4. Динамический синтез кулачкового механизма

161
12.1. Кинематический анализ кулачковых механизмов Рис Кулачковые механизмы

163
Пример 1 (Рис. 109, ж) Рис Схема к примеру 1
 Рис. 110. Схема к примеру 1")
164
Пример 2 Рис. 109, д Рис Схема к примеру 2

165
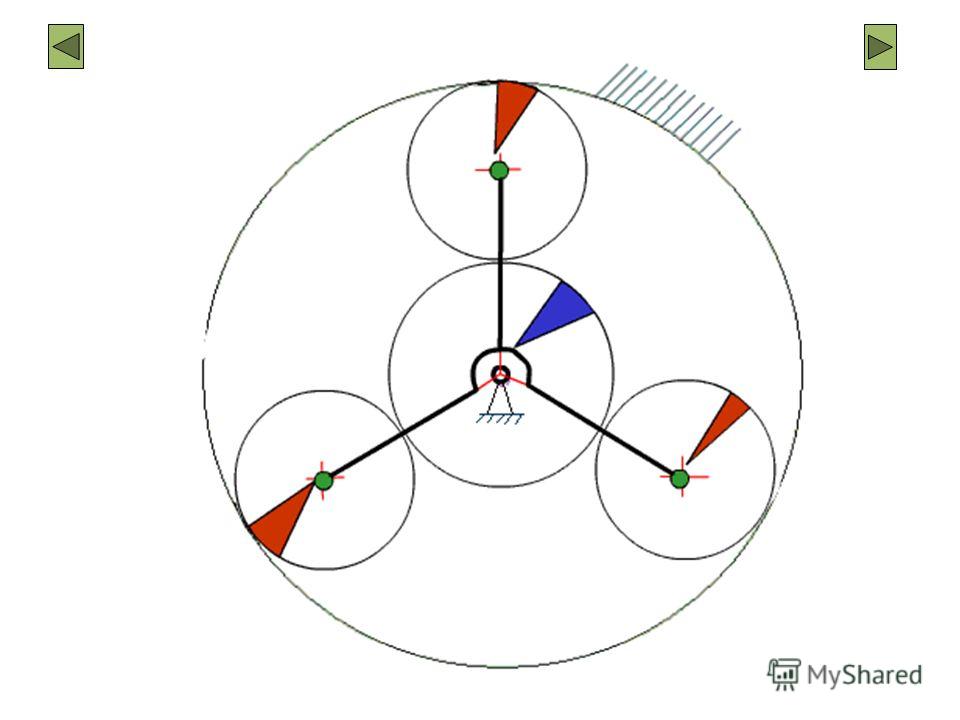
Пример 3 (Рис. 109, л)Рис. 109, л) Рис Построение теоретического профиля кулачка OAk 1 = r 0 + r р
Рис. 109, л) Рис. 112. Построение теоретического профиля кулачка OAk 1 = r 0 + r р")
166
Построение графиков перемещения, угловой скорости и углового ускорения коромысла (Рис. 113) Рис Для
 Рис. 113. Для")
167
Рис График движения ведомого звена

168
12.2. Законы движения ведомого звена Рис Закон движения ведомого звена, приводящий к жёсткому удару

169
Рис Законы движения ведомого звена, приводящие к мягкому удару а) б)
 б)")
170
12.3. Определение действительного угла передачи Рис Рис Схема к определению угла давления

171
Из плана скоростей: (рис. 117, б) (12.1) (рис. 117, а) У архимедовой спирали Кулачок выполнен по логарифмической спирали План скоростей:
 (12.1) (рис. 117, а) У архимедовой спирали Кулачок выполнен по логарифмической спирали План скоростей:")
172
В случае кулачка произвольного профиля (12.2) для механизмов с толкателем для механизмов с коромыслом
 для механизмов с толкателем для механизмов с коромыслом")
173
12.4. Динамический синтез кулачкового механизма Рис Построение профиля кулачка б)б) а)а)
б) а)а)")






























 788-72-47, E-mail: info@betec.ru, Internet: www.betec.ruinfo@betec.ruwww.betec.ru Методы бизнес-анализа в системе Бизнес-инженер.")
