Скачать презентацию
Идет загрузка презентации. Пожалуйста, подождите

1
Липецкий государственный технический университет Кафедра прикладной механики Мультимедийное пособие для курсового проектирования по ТММ по ТММ (для студентов очно-заочной формы обучения ОЗА, ОЗАТ, ОЗТМ, ОЗМД) Кинематический и силовой расчеты рычажных механизмов Построение планов скоростей и ускорений, планов сил и определение уравновешивающей силы (уравновешивающего момента) методом «рычага» Н.Е. Жуковского Авторы: Бондаренко П. А., Ганул Е. В. Липецк 2008
 Кинематический и силовой расчеты рычажных")
2
Оглавление: 1. Построение плана скоростей Построение плана скоростей Построение плана скоростей 2. Построение плана ускорений Построение плана ускорений Построение плана ускорений 3. Силовой расчет Силовой расчет Силовой расчет 4. Силовой расчет ведущего звена Силовой расчет ведущего звена Силовой расчет ведущего звена 5. Определение уравновешивающей силы (уравновешивающего момента) методом «рычага» Н.Е. Жуковского Определение уравновешивающей силы (уравновешивающего момента) методом «рычага» Н.Е. Жуковского Определение уравновешивающей силы (уравновешивающего момента) методом «рычага» Н.Е. Жуковского 6. Пример графической части курсовой работы Пример графической части курсовой работы Пример графической части курсовой работы 7. Литература Литература

3
Общие указания Самостоятельная работа по исследованию рычажного механизма предусматривает выполнение студентами структурного, кинематического и кинетостатического анализа. При структурном анализе необходимо определить число степеней свободы механизма, назвать механизм и все входящие в его состав звенья и кинематические пары, определить назначение механизма и привести примеры его использования. При структурном анализе необходимо определить число степеней свободы механизма, назвать механизм и все входящие в его состав звенья и кинематические пары, определить назначение механизма и привести примеры его использования. При кинематическом анализе необходимо построить планы механизма в приемлемом масштабе для 8 положений, определить крайние («мертвые») положения механизма, построить траекторию движения точки D и указать точки возврата. Построить планы скоростей и ускорений для заданного положения механизма (положение механизма определяется величиной угла наклона первого звена – задается преподавателем),определить скорости и ускорения всех характерных точек, угловые скорости и ускорения При кинематическом анализе необходимо построить планы механизма в приемлемом масштабе для 8 положений, определить крайние («мертвые») положения механизма, построить траекторию движения точки D и указать точки возврата. Построить планы скоростей и ускорений для заданного положения механизма (положение механизма определяется величиной угла наклона первого звена – задается преподавателем),определить скорости и ускорения всех характерных точек, угловые скорости и ускорения При кинетостатическом анализе необходимо определить силы инерции звеньев, реакции в кинематических парах и уравновешивающую силу на ведущем звене при заданном положении механизма. Считаем что сила полезного сопротивления приложена в точке D и направлена противоположно направлению скорости этой точки. Силами трения в кинематических парах пренебрегаем. Правильность выполнения силового расчета проверяем по теореме Н.Е. Жуковского о «жестком рычаге», ошибка при этом не должна превышать 5% При кинетостатическом анализе необходимо определить силы инерции звеньев, реакции в кинематических парах и уравновешивающую силу на ведущем звене при заданном положении механизма. Считаем что сила полезного сопротивления приложена в точке D и направлена противоположно направлению скорости этой точки. Силами трения в кинематических парах пренебрегаем. Правильность выполнения силового расчета проверяем по теореме Н.Е. Жуковского о «жестком рычаге», ошибка при этом не должна превышать 5%

4
Дано: m 1, m 2, n 1, I s1, Is 2, F пс, все длины звеньев и координаты их центров масс

7
К оглавлению

26
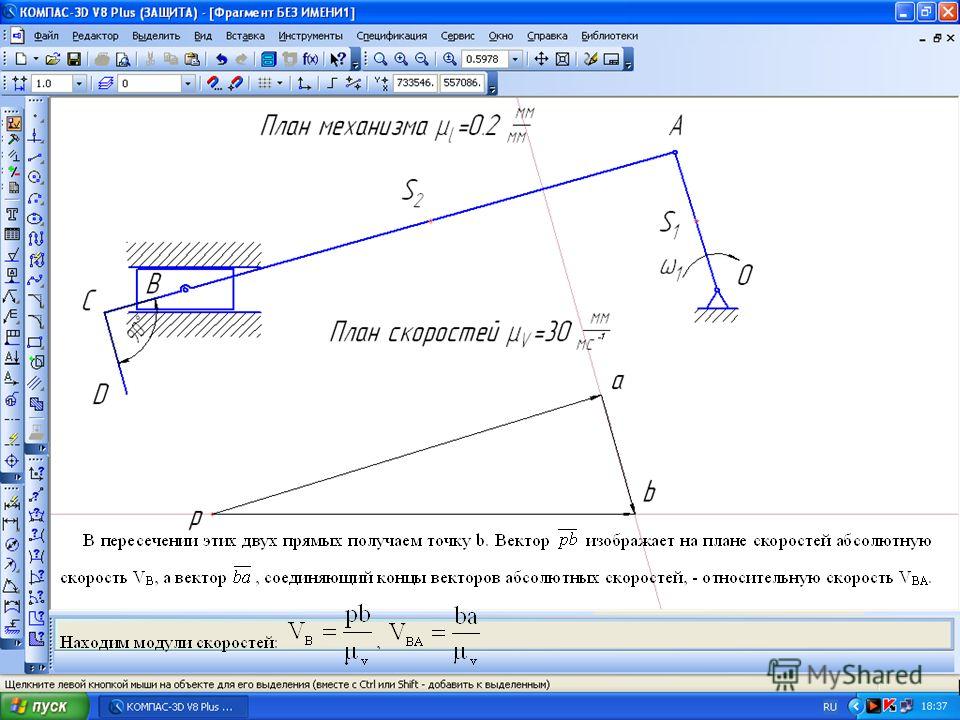
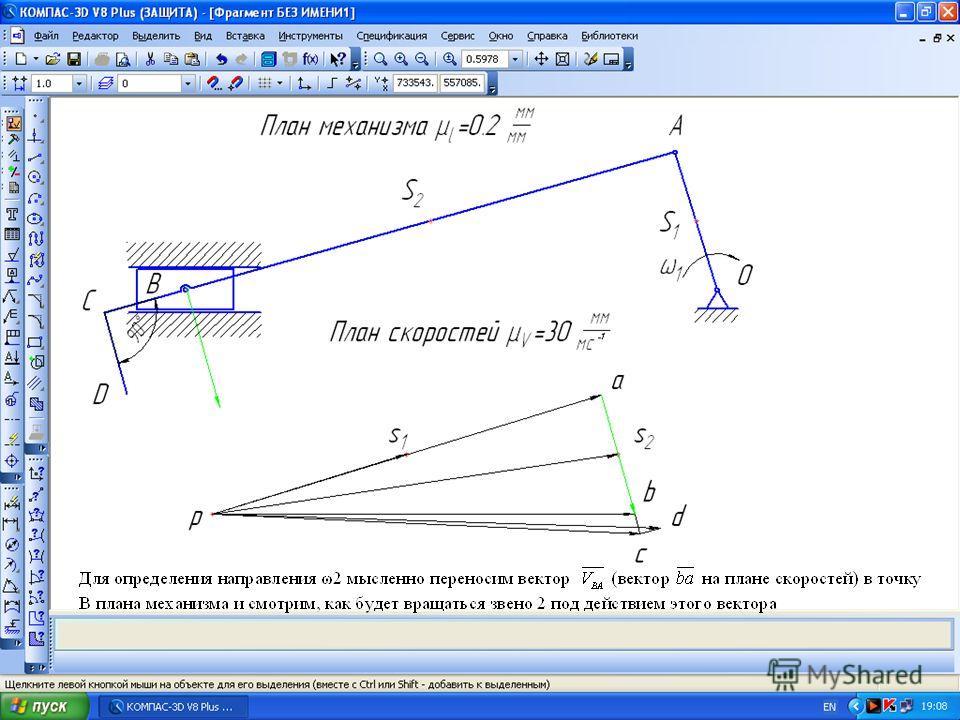
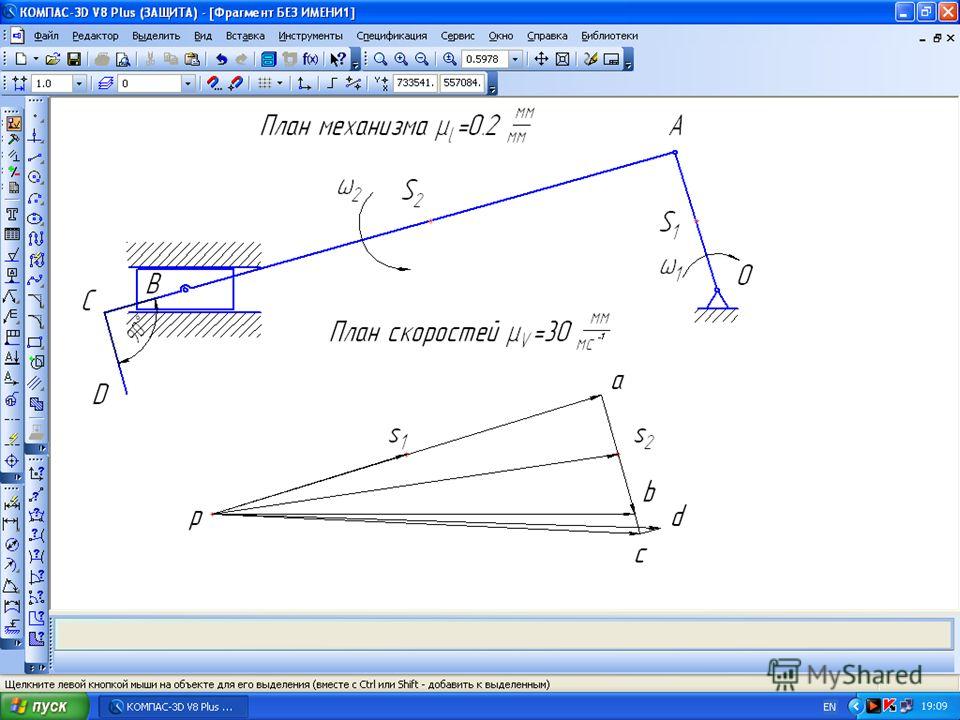
S2S2

27
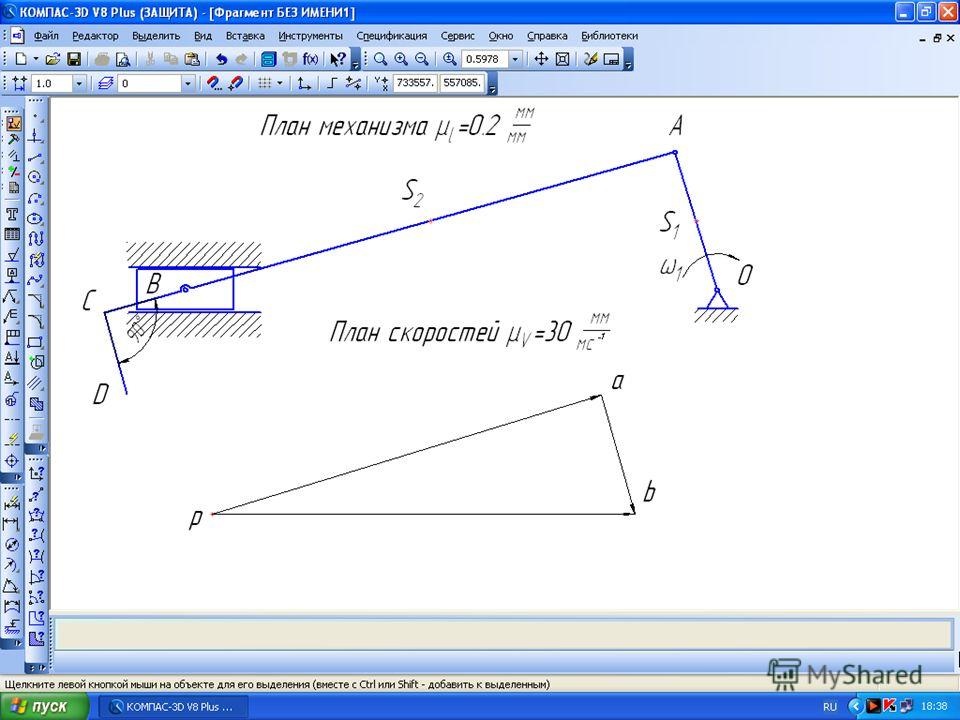
S2S2

28
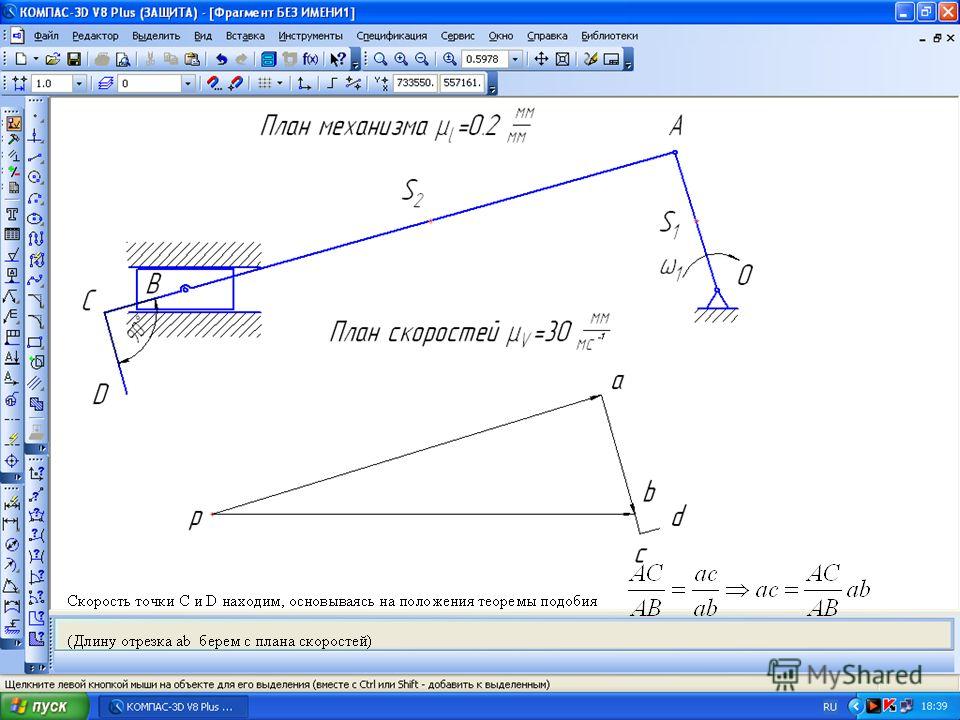
S2S2

29
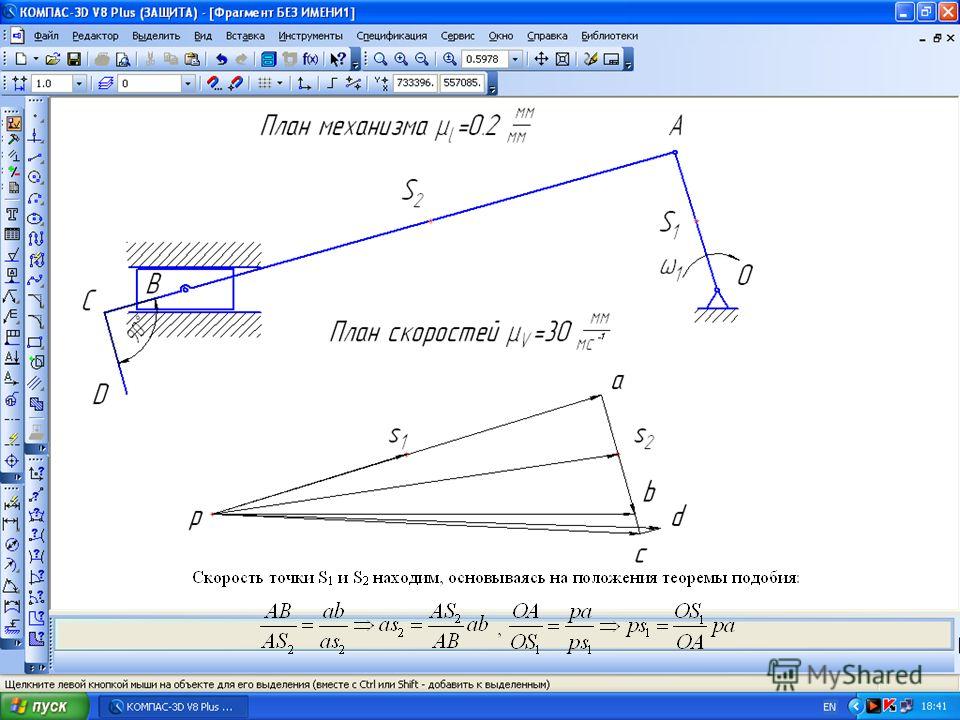
S2S2

30
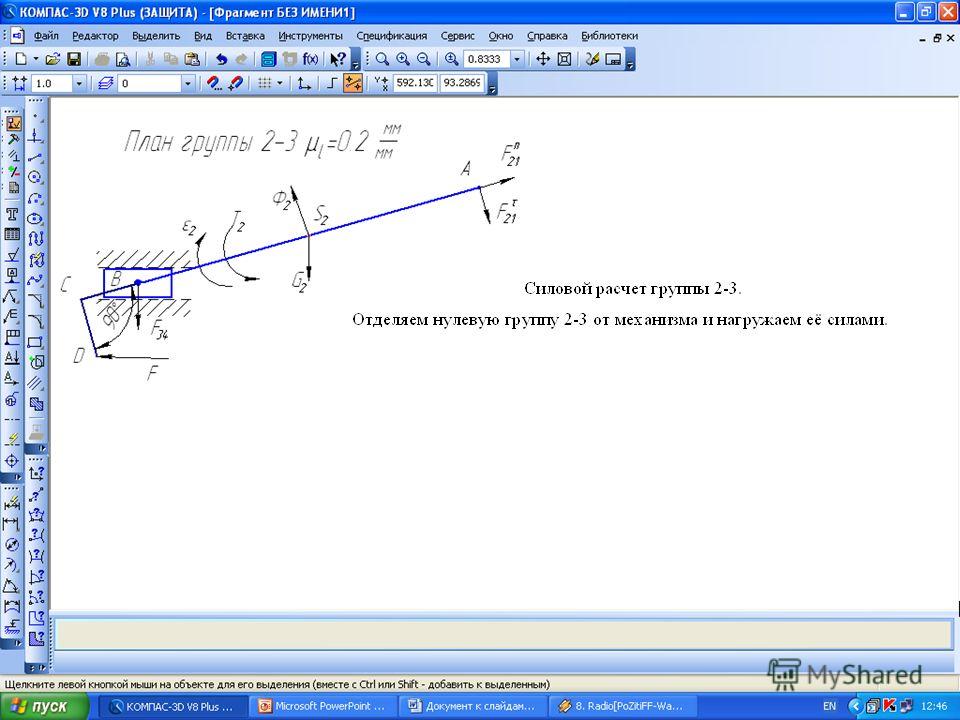
3. Силовой расчет механизма Во время движения механизма в его кинематических парах действуют силы, являющиеся силами взаимодействия между звеньями. Эти силы относятся к категории внутренних по отношению к механизму в целом. Нагруженность кинематических пар силами взаимодействия является важной динамической характеристикой механизма. Знание сил в кинематических парах необходимо для расчета звеньев механизма на прочность, жесткость, вибростойкость, износоустойчивость, для расчетов подшипников на долговечность и для проведения других подобных расчетов, выполняемых при проектировании механизма. Определение внутренних сил, а также в целом ряде задач сил и пар сил, приложенных к механизму извне, составляет содержание его силового расчета. Порядок расчета: мысленно разделяем схему механизма на статически определимые подсистемы (группы Ассура), заменяя действие связей между ними действиями сил (реакций связей). Это разделение производится для расчета системы поочередно, по частям, в качестве которых рассматриваются структурные группы, а также система, образованная начальным звеном и стойкой. Расчет начинается с группы наиболее удаленной от начального звена, с последовательным приближением к нему. Система, образованная начальным звеном и стойкой, рассчитывается в последнюю очередь, т.е. силовой расчет идет в порядке обратным формулы строения механизма. К оглавлению

31
3.1. Определение равнодействующих сил инерции

34
Обратите внимание на направление смещения силы инерции Ф 2 Она должна давать то же направление момента относительно центра масс, что и момент Т 2

35
Для облегчения решения рекомендуется такая последовательность: 1.Силы группируются по звеньям; 2.Две составляющие одной и той же силы записываются рядом 3.Неизвестные силы записываются по краям уравнения

36
Через начало вектора с которого начиналось построение, проводим линию по которой действует первый вектор уравнения (3) А через конец последнего известного вектора уравнения - линию действия последнего слагаемого уравнения
 А через конец последнего известного вектора уравнения - линию действия последнего слагаемого уравнения")
37
Указываем результирующую силу F 21

38
К оглавлению

39
Направление пока неизвестно

41
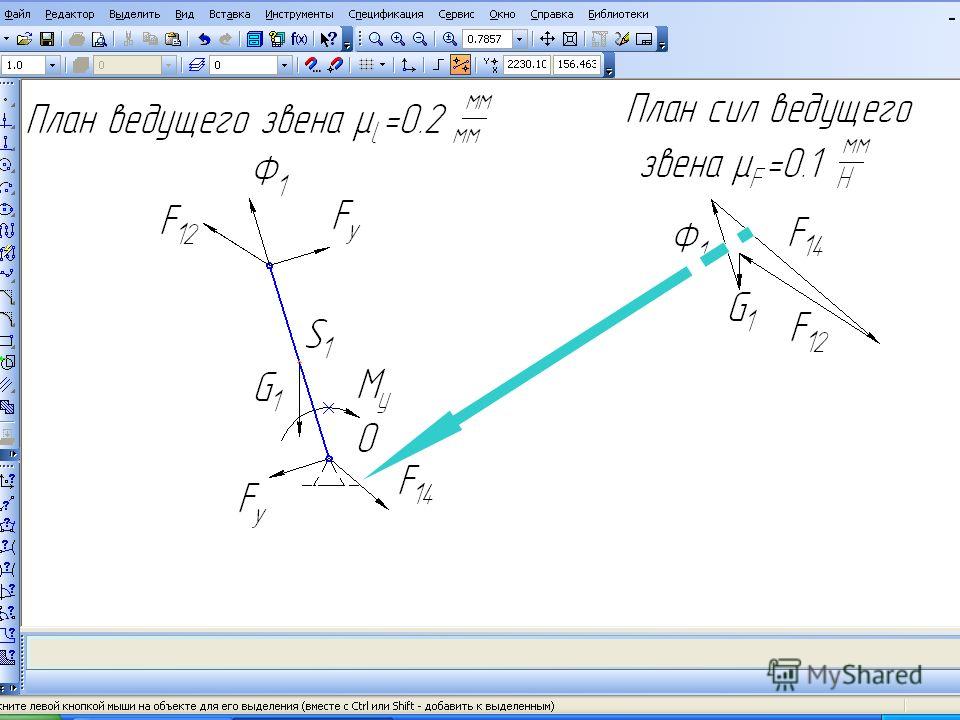
В некоторых заданиях необходимо определить уравновешивающий момент, т.е. момент который должен быть приложен со стороны привода механизма (например со стороны электродвигателя). Для его нахождения необходимо на чертеже изобразить входное звено, нагрузить его силами, составить и решить уравнения статики.
. Для его нахождения необходимо на чертеже изобразить входное звено, нагру")
42
Заменяем действие уравновешивающего момента действием пары сил Fy Направление момента пары сил должно совпадать с направлением уравновешивающего момента

43
Направление пока неизвестно

45
К оглавлению

46
Что бы не загромождать чертеж, плечи сил указаны не все

48
Пример графической части курсовой работы К оглавлению

49
Пример выполнения расчетно-пояснительной записки к курсовой работе (титульный лист и бланк задания не показаны) 1-й лист РПЗПоследующие листы РПЗ
 1-й лист РПЗПоследующие листы РПЗ")
50
Литература: 1. Баранцов В.Я. Методическое указание (307) к расчетно-графической работе по курсу «Прикладная механика». – Липецк: ЛГТУ,1990. – 34 с. 2. Попов С.А., Тимофеев Г.А. Курсовое проектирование по теории механизмов и машин: Учеб. Пособие для втузов/ Под ред. К.В. Фролова. – 3-е изд., стер. – М.: Высш. шк., – 351 с. 3. Фурсов Б.Т., Носов В.В. Методическое указание (818) к курсовой работе по теории механизмов и машин для студентов механических и машиностроительных специальностей. – Липецк: ЛГТУ, – 21 с. К оглавлению
 к расчетно-графической работе по курсу «Прикладная механика». – Липецк: ЛГТУ,1990. – 34 с. 2. Попов С.А., Тимофеев Г.А. Курсовое проектирование по теории механизмов и машин: Учеб. Пособие для в")
51
Если Вы обнаружили ошибку или можете предложить как можно улучшить данное электронное издание, просьба обратиться к авторам на кафедру «Прикладная механика» 1 корпус 224 ауд. Если Вы обнаружили ошибку или можете предложить как можно улучшить данное электронное издание, просьба обратиться к авторам на кафедру «Прикладная механика» 1 корпус 224

Еще похожие презентации в нашем архиве: