Скачать презентацию
Идет загрузка презентации. Пожалуйста, подождите

1
Девятериков Е. А. Научно-учебный центр «Робототехника» МГТУ им. Н.Э. Баумана Руководитель Михайлов Б. Б.

2
Энкодеры Снижение точности при проскальзывании колес IMU Постоянное интегрирование GPS Не работает в закрытых помещениях Низкая точность Дальномер Дорого Нужны объекты в зоне видимости Нужно устройство сканирования, сложная обработка

3
Работает в недетерминированной среде Наличие камер позволяет решать другие задачи Нечувствительна к проскальзыванию колес

4
Разработать алгоритм измерения пути Программно реализовать алгоритм Разработать 3D модель для тестирования алгоритма Изготовить макетный образец системы Провести экспериментальные исследования системы на мобильном роботе

5
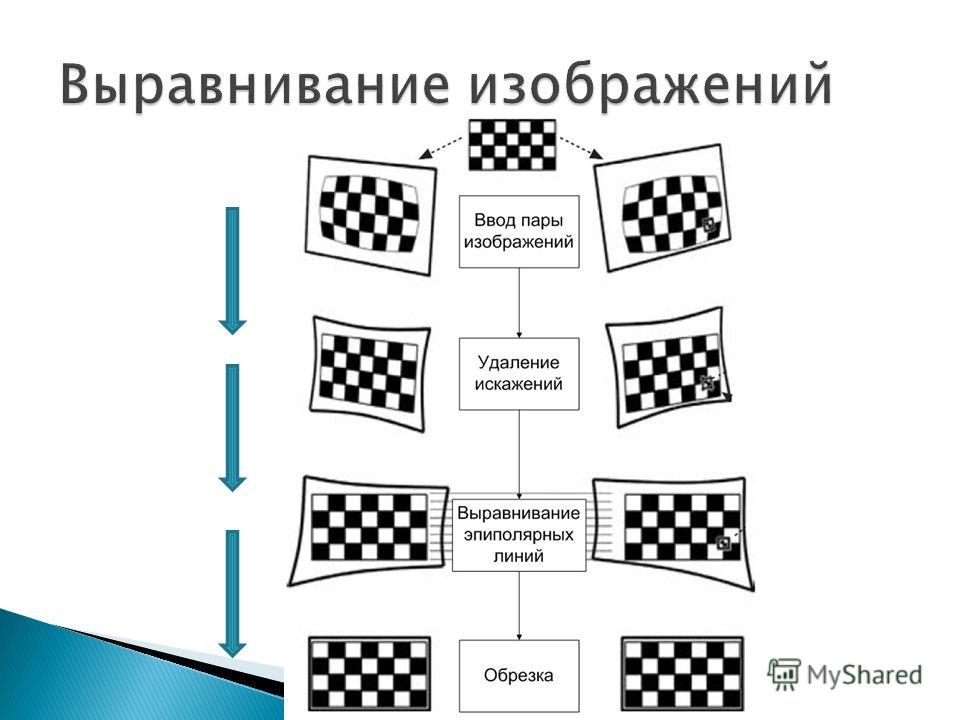
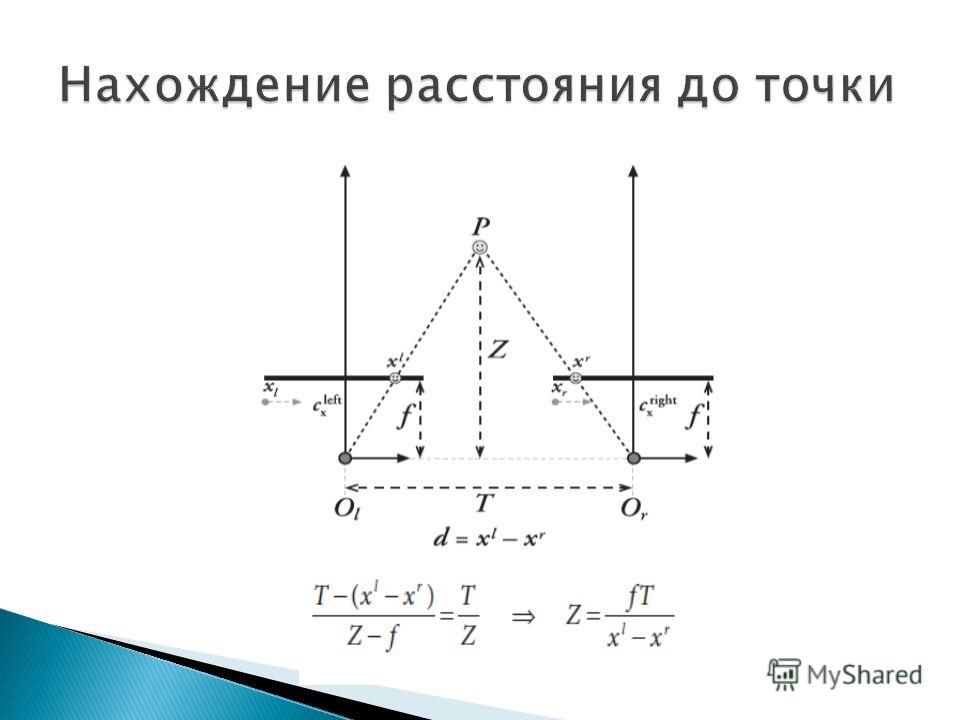
Выравнивание Поиск особых точек Вычисление 3D координат Вычисление перемещения

8
Метод Гарриса Метод FAST N > 9?

9
Ограничения Постоянство яркости Маленькие смещения Когерентные смещения

10
Точки инвариантны к: масштабу повороту искажениям

14
Среднее квадратичное отклонение при многократном смещении на малые равные расстояния Ошибка выхода в исходную точку при движении по замкнутой траектории

18
FPSСреднее квадратичное отклонение, % FAST HARRIS SURF

20
FPSОшибка, % FAST HARRIS SURF

21
Алгоритм Скорость обработки (FPS), кадров/c Ошибка выхода в исходную точку, % Среднее квадратичное отклонение при перемещении на равные интервалы, % FAST HARRIS SURF
, кадров/c Ошибка выхода в исходную точку, % Среднее квадратичное отклонение при перемещении на равные интервалы, % FAST37.27.24.8 HARRIS17.97.65.2 SURF10.03.84.1")
22
разработан алгоритм визуальной одометрии; алгоритм реализован в виде программы; алгоритм проверен на тестовых изображениях с разработанной 3х мерной модели системы; изготовлен макет системы визуальной одометрии; проверена работоспособность системы на реальных изображениях, полученных при движении мобильного робота, определены ее точность и быстродействие.

Еще похожие презентации в нашем архиве:








")


















