Скачать презентацию
Идет загрузка презентации. Пожалуйста, подождите

1
Презентация исследовательской работы на тему: «Как мы строили робота» Выполнена учениками 2 «А»класса МОУ гимназии «Гармония» Оленик Светозар Баканова Алина Руководитель исследовательской работы Резачкина Е.Л

2
Цель исследования: Выяснить принцип строения и работы робота Задачи: 1.Узнать, как построен робот 2.Выяснить, что нужно, чтобы робот двигался 3.Расследовать, как пишутся программы

3
Гипотезы Гипотеза 1- робот будет подвижный, если его сделать из чего-то мягкого Гипотеза 2- робот будет подвижный, если соединить твердые части Гипотеза 3-если известна точка отсчёта, то определим местонахождение предмета в пространстве

4
Введение. Что такое Робот. Актуальность Это случилось когда мы ходили в детский сад, Я со Светозаром строила шалаш. Но шалаш не получался. Потом мы строили воздушный шар и он тоже не получился. И тогда Светозар сказал «Давай сделаем робота, и он нам все построит» Обратимся к литературе. РОБОТ -автоматическое устройство, заменяет человека при выполнении производственных или других работ.

5
Построение подвижной модели робота А с чего начать, может как Леонардо да Винчи с чертежей? Первый -похож на человека, Андроид (в честь Анри-Дро). Второй на машину- промышленный. Как же он будет двигаться?
. Второй на машину- промышленный. Как же он будет двигаться?")
6
Гипотеза - робот будет подвижный, если сделать из мягкого материала. Снег подойдёт? Нет - растает. Попробуем пластилин! Эксперимент1. Робот действительно подвижный. Испытаем руку. Вверх, ой…оторвалась. Вывод: Материал должен быть твердый. Наблюдаем за рукой- состоит из трех частей, имеющих соединение, где происходит сгиб!

7
Гипотеза 2 –робот будет подвижный, если соединить твёрдые части. Сделаем модель из картона и проволоки. Проанализируем объект. Движения можно производить неограниченное количество раз! Цель достигнута. Вывод:если сделать больше мелких деталей, то робот будет подвижнее!

8
Но зачем его делать подвижнее? Давай поставим задачу- что он будет делать? Движения- в лево, сомкнуть пальцы, в право, разомкнуть. Пусть перекладывает скрепки из одной коробки в другую!

9
Обратившись к руководителю, мы узнаем что: Робот в виде руки называется манипулятором! Наука, изучающая движение называется – кинематикой! Неподвижная часть -звено! Соединенные звенья- кинематическая пара! Несколько звеньев -кинематическая цепь! Наш манипулятор является кинематической цепью! А главная часть любого робота –это рабочий орган, которым выполняется полезная работа.

10
Но почему, робот не двигается ? Эксперимент 2 Собираем конструктор- робот для запуска мыльных пузырей. Имеем схемы,детали.

11
От батареек по проводам питание поступает в моторчик, он вращает каркас, через который надуваются пузыри. Вывод: Для того чтобы привести в движение робота- надо двигатель и питание.

12
Эксперимент 4. Завяжем глаза Светозару. Он не находит яблоко без команд. Вывод- Роботу нужна программа. Эксперимент: Завяжем глаза Алине, её рука рабочий орган. Задача -схватить яблоко. Алина выполнила команды «Шаг вперед!»,«Налево!», «Рука вверх», «Разжать пальцы!» «Сомкнуть» Яблоко в руках!

13
Эксперимент 5.Спрячем яблоко. Напишем программу «влево шаг», «вправо 2»,«поднять руку», «взять яблоко».Светозар заходит, даем программу. Вопрос- откуда идти?! Вывод:Необходимо задать точку отсчета. Чертим мелом на полу

14
Гипотеза 3- если известна точка отсчёта, то определим местонахождение предмета в пространстве Эксперимент 6 Положим яблоко на середину комнаты. Обозначим точку отсчета. Я прошла три шага, яблоко оказалось в стороне. Вывод: точки отсчета недостаточно.

15
Эксперимент 7 От точки отсчета рисуем две оси, обозначили –X и Y Алина определяет положение яблока«три шага по Х, два Y».Сдвинули яблоко. Я иду «два по Х, два по Y». Меняем задачу: Светозара нет. Я записала программу «Х=3; Y=4». Положив туда яблоко. Светозар дошел до него по программеХ=3; Y=4».

16
Эксперимент 8 Яблоко на столе. Иду «Х=3;Y=1.»?« И два вверх!» Эта ось называется «Z». Эксперимент 9 Я«рабочий орган робота». Задача- выкрутить лампочку. Программа «Х=3; Y=2; Z=5» (По оси Z=5 встаем на табурет.) Вывод: оси координат необходимы. Попробуем понять положение осей при помощи кубиков. Закрепляем полученные навыки на бумаге.
 Вывод: оси координат необходимы. Попроб")
17
Отправляемся на экскурсию в цех завода «Реммаш-Сервис», Вот бы увидеть робота! А где найти? На заводе «Реммаш-Сервис» есть станок с числовым программным управлением- промышленный робот.

18
Мастер цеха Мишин Д.А рассказал нам про работу станка

19
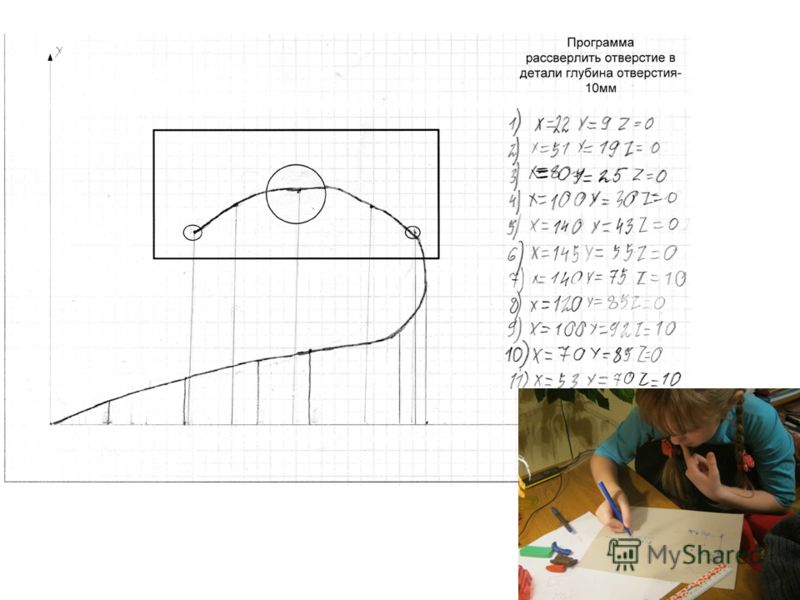
Мы увидели рабочий орган станка на который крепится сверло. Он перемещается по заданной программе. Которая вводится в (ЧПУ) компьютер, соединенный со станком, проводами. На экране высвечиваются оси координат. Для перемещения необходимо записать программу. У роботов этот компьютер чаще всего называется контроллером.
 компьютер, соединенный со станком, проводами. На экране высвечиваются оси координат. Для перемещения необходимо записать прогр")
22
ВЫВОД Робот - сложное устройство, чтобы его построить надо: 1. Определить задачу -Что он будет делать! 2. Построить тело из соединенных между собой звеньев! 3. Двигатель- чтобы он двигался! 4. Питание- для работы двигателя! 5. Правильно написанная программа. И устройство для ее ввода! Нам еще много надо учиться, чтобы построить Робота!

Еще похожие презентации в нашем архиве:
















 наука о движении материальных объектов и взаимодействии между ними.")




