Скачать презентацию
Идет загрузка презентации. Пожалуйста, подождите

2
обнаружение и сопровождение блестящих точек на фоне шумовой составляющей, статистические характеристики которой совпадают или мало отличаются от соответствующих характеристик мерцания сопровождаемого объекта.

3
компьютерная модель фоноцелевой обстановки и программная реализации алгоритма непрерывного сопровождения движущегося объекта с вычислением картинных координат Х и У отслеживаемого объекта, вычисляющего прогноз поведения объекта на несколько шагов вперед.

4
Представленный алгоритм предназначен для реализации в бортовом процессоре

5
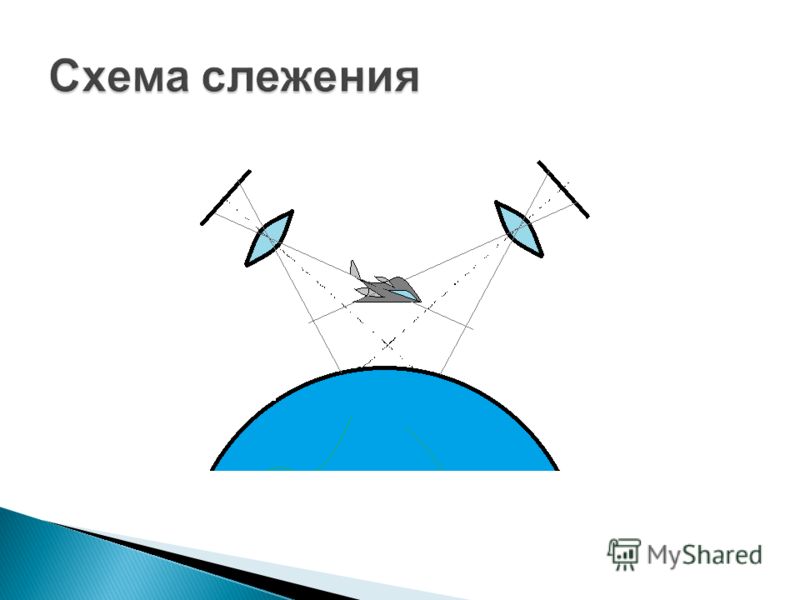
предполагается, что три координаты движущегося объекта и прогноз по трем координатам вычисляются с помощью двух аналогичных процессоров, базирующихся на платформах, разнесенных в пространстве, несущих контролирующие полупространство фокальные системы с сенсорами на ПЗС

6
дискретность в определении координат достигается с намного более высокой плотностью нанесения отсчетов на траектории, чем дискретность, порождаемая значением плотности распределения пикселов от ПЗС на плоскости картинного транспаранта

8
Оптические оси фокальных систем наблюдения пересекаются на существенном удалении от платформ, а вся двухплатформенная система предназначена для наблюдения за объектами на больших расстояниях, когда модель фоноцелевой обстановки представляется в виде суммы регистрируемых излучений, соответствующих фоновой составляющей Земли (подстилающей поверхности) или неба, динамического, изменяющегося от кадра к кадру шума – случайной составляющей, и…

9
точечных, мерцающих подобно точкам шумовых составляющих, движущихся объектов с параметрами движения, включающими случайные аддитивные слагаемые с дисперсией, ограничиваемой требованиями к динамическим характеристикам способности объекта к маневру

10
Рис.1. Рабочее окно моделирующей программы с фоном и динамическим нормальным шумом

11
расфокусировка цифрового кадра маской 7х7 и 13х13; нормализация изображений на кадрах; попиксельное накопление цифровых кадров «7х7» и «13х13» в двух соответствующих вычислительных ветвях с периодическим подавлением постоянной составляющей; попиксельное вычитание суммокадров, удаляющее регулярные составляющие.

12
В качестве критериев выполнения процедур продолжения и сшивки траекторий с разрывами и построения эллипса с вероятностью обнаружения объекта не меньшей 0,7, а также удаления остаточного шума на потоке суммокадров, используются параметрические критерии, вычисляемые на основе построения алгоритма- наблюдателя Неймана-Пирсона с модификацией решающих правил на нечеткое логическое исчисление с заданием разрешенной вероятности пропуска цели на ограниченном участке отслеживаемой траектории и с минимизацией вероятности ложной тревоги.

13
несколько кадров потока суммокадров накладываются друг на друга в режиме «полупрозрачной кальки», т.е. формируется изображение для анализа кинематических параметров выделяемой траектории и динамических параметров объекта для продолжения (интегрирования уравнения с заданной скоростью и ускорением движения объекта на несколько шагов вперед) траектории-прогноза движения.

14
Рис.2. Рабочее окно программы с моделируемыми траекториями пролета объектов.

15
Процедура установки порогов, применяющаяся в процессе принятия решения - выявления регулярной составляющей в окне обработки данных, а также подавления остаточного шума, построена на использовании вычисленных в предварительных процедурах оценок интегральных параметров (дисперсия исходного изображения), D с (динамический диапазон контрастов выделяемых образов), (полоса пространственных частот занимаемая спектральными портретами регулярных составляющих), р (полоса пересечения пространственных частот спектральных портретов регулярных образов и шумов), (радиус корреляции шума), A (средняя апертура выделяемого образа) в соответствии с методологией теории "Наблюдатель Неймана- Пирсона" определяется ряд лингвистических переменных:

16
- переменная, определяющая модальность атома: "фильтруемый или распознаваемый элемент есть шум". Лингвистические значения соответствуют конкатенации лингвистических значений р и, определяемых функцией принадлежности высказываний "Нулевое", "Низкое", "Среднее", "Высокое" соответствующим гипотетическим нормированным интервальным значениям вида [0,0.1], [0.1,0.3], [0.3,0.7], [0.7,1], принадлежащим области значений вероятности ложной тревоги при заданных D с и в методе "Наблюдатель Неймана-Пирсона". В таблице 1 приведены лингвистические значения.

17
Таблица 1. Лингвистические значения

18
переменная - вероятность обнаружения в методе "Наблюдатель Неймана-Пирсона", определяющая модальность атома "фильтруемый или распознаваемый элемент есть регулярный образ". переменная - модальность атома "выявлен регулярный образ". Значение переменной определяется методом взвешивания на рычажных весах, т.е. в какую сторону сместится значение, если на «чаши весов» класть различные значения и по обе стороны, соответственно, от стрелки весов (Таблица 2).

19
Таблица 2. Зависимость значений лингвистической переменной L от значений L и L.

20
В выбранном окне обработки для выделяемого элемента вычисляется соотношение,, квазипропорциональное отношению "энергия шума / энергия сигнала", умноженному на верхнюю оценку вероятности ложной тревоги.,,

21
Рис.3. Рабочее окно с прослеженной траекторией одного из объектов.

22
Процессор, реализующий алгоритм построен по конвейерно – параллельной схеме с каскадным и тактируемым коммутатором блоков процессора друг с другом для реализации перепрограммирования его конфигурации. Поле ПЗС-транспаранта 1024х1024 построено на основе блоков из ПЗС-матриц 32х32 с параллельным считыванием информации с блоков.

23
Вычисления сверток выполняются погружением алгоритма свертки и потоков данных в систему остаточных классов, выход в позиционную двоичную систему реализуется табличными преобразованиями. Кроме этого были использованы и некоторые другие методы оптимизации вычислительного процесса. Все это позволило на шесть порядков снизить количество однотактных операций по выполнению задачи.

Еще похожие презентации в нашем архиве:






 относится к классу основных преобразований при цифровой обработке сигналов.")












![Лекция 13 Метод трассировки лучей Астана 2004. Трассировка лучей через сферическую каплю воды Луч 7 -- луч Декарта [1637]](/thumbs/6/676291/big_thumb.jpg "Лекция 13 Метод трассировки лучей Астана 2004. Трассировка лучей через сферическую каплю воды Луч 7 -- луч Декарта [1637]")


