Скачать презентацию
Идет загрузка презентации. Пожалуйста, подождите

1
Разработка модуля оценивания параметров для систем с рандомизированными управлениями Дипломная работы студентки 545 группы Филипповой Анастасии Валерьевны Научный руководитель: д.ф.-м.н., проф. Граничин О.Н. Рецензент: Бондарев А.В.

2
Модель объекта управления

3
Предметная область Управление Идентификация параметров Адаптивное управление

4
Управление БПЛА

5
Проблематика Обилие теоретических работ – множество алгоритмов Алгоритмы зависят от большого количества параметров В практических задачах приходится комбинировать различные алгоритмы

6
Постановка задачи Реализовать симулятор с возможностью выбора параметров объекта управления и типов неопределённостей (помех) Спроектировать расширяемый модуль адаптивного управления с возможностью выбора используемых алгоритмов и задания их начальных параметров Реализовать модуль адаптивного управления с возможностью встраивания в реальную физическую систему путём замены симулятора на данные датчиков Реализовать несколько базовых алгоритмов
 Спроектировать расширяемый модуль адаптивного управления с возможностью выбора используемых алгоритмов и задания их начальны")
7
Существующие решения MATLAB/Simulink Control System Toolbox GNU Octave/Scicos Octave Control Systems Toolbox

8
Выбор технологий Управляемый язык (Java,.NET) Интерпретация байт-кода Сборщик мусора Потери производительности Компилируемый язык (C, C++) Ручное управление памятью Большие затраты на разработку
 Интерпретация байт-кода Сборщик мусора Потери производительности Компилируемый язык (C, C++) Ручное управление памятью Большие затраты на разработку")
9
Архитектура

11
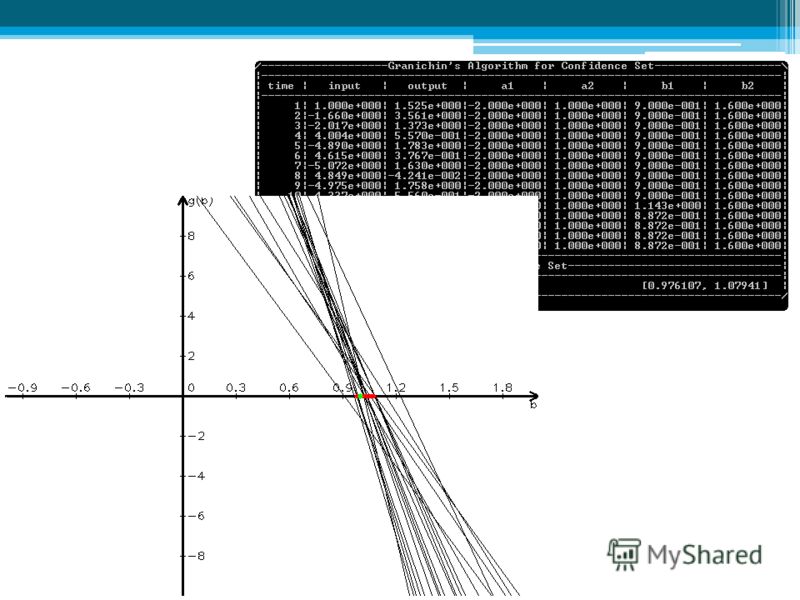
Алгоритмы Регуляторы: Алгоритм регулятора обратной связи Алгоритм стабилизирующего регулятора обратной связи Алгоритмы идентификации: Рандомизированный алгоритм идентификации параметров Стабилизирующий алгоритм «модифицированная полоска» Алгоритмы построения доверительного множества: Алгоритм Campi M.C. для построения доверительного множества Алгоритм Граничина О.Н. для построения доверительного множества

13
Апробация Произведена пробная сборка модуля под архитектуру микропроцессора ARM Планируется внедрение в БПЛА проекта SmartFly для корректировки траектории полёта

14
Заключение Реализован симулятор с возможностью выбора параметров объекта управления и типов неопределённостей (помех) Реализован расширяемый модуль адаптивного управления на языке C++ Реализованы следующие алгоритмы: Алгоритм регулятора обратной связи Алгоритм стабилизирующего регулятора обратной связи Рандомизированный алгоритм идентификации параметров Стабилизирующий алгоритм «модифицированная полоска» Алгоритм Campi M.C. для построения доверительного множества Алгоритм Граничина О.Н. для построения доверительного множества Производится встраивание в БПЛА
 Реализован расширяемый модуль адаптивного управления на языке C++ Реализованы следующие алгоритмы: Алгоритм регулятора обратной связ")
Еще похожие презентации в нашем архиве:









 Научный руководитель: А.Н.Терехов Рецензент: Д.В.Кознов.")



 Научный руководитель: д.т.н., проф. Рубцов В.П. Аспирант: Елизаров В.А. 1.")







