Скачать презентацию
Идет загрузка презентации. Пожалуйста, подождите

1
Автоматизированные системы управления судовыми дизельными энергетическими установками (АСУ СДЭУ) Иллюстрационный материал к лабораторным работам для студентов специальности «Эксплуатация судовых энергетических установок» Разработал: Малахов И.И. Омский институт водного транспорта (филиал) ФГОУ ВПО «НГАВТ» 2009 г.
 Иллюстрационный материал к лабораторным работам для студентов специальности 180403 «Эксплуатация судовых энергетических установок» Разработал: Малахов И.")
2
Автоматическое регулирование – поддержание постоянным или изменение по заданному закону некоторой величины, характеризующей процесс, осуществляемое путем определения состояния объекта или действующих на него возмущений и воздействия на регулирующий орган объекта. Автоматическая система регулирования любой сложности состоит из управляемого объекта и автоматического управляющего устройства, взаимодействующих между собой. Управляемый объект – техническое устройство, осуществляющее технический процесс, который нуждается в оказании специально организованных воздействий извне на исполнительный орган объекта для выполнения его алгоритма функционирования. К управляемым объектам можно отнести само судно, энергетическую установку, ГД, ДГ и др.

3
Воздействия – величины, характеризующие влияние, оказываемое на объект извне. Управляющие воздействия – это воздействия вырабатываемые управляющим устройством (или задаваемые человеком). Возмущающие воздействия – это воздействия не зависящие от системы управления. Могут быть двух видов: нагрузки и помехи. Задающие воздействия – это воздействие содержащее информацию о требуемом значении управляемой величины. Управляемая величина – физическая величина, характеризующая процесс, требуемое значение которой необходимо получить в результате управления.
. Возмущающие воздействия – это воздействия не зависящие от систе")
4
В функциональной схеме система разбита на элементы исходя из выполняемых ими функций, т.е. назначения. Элемент автоматики – простейшая конструктивно-целостная ячейка системы, предназначенная для выполнения операций с сигналом (преобразование, усиление и пр.). С 1, С 2 – сельсины; МУ – магнитный усилитель; ОУ 1, ОУ 2 – обмотки управления; ЭМУ – электромашинный усилитель; ИД – исполнительный двигатель; МП – механическая передача. g – задающее воздействие (поворот штурвала); θ 1 – управляющее воздействие (поворот вала ИД); θ 2 – управляемая величина (поворот баллера руля); U 1 – напряжение на обмотках управления; U 2 – напряжение на выходе из МУ; E S – э.д.с. наводимая ЭМУ.

5
W 2 (p)W 3 (p)W 4 (p)W 5 (p)W 1 (p) W 4 (p) gεU1U1 U2U2 EsEs θ 1 θ1θ1 θ2θ2 θ2θ2 MНMН С1С2С1С2 МУЭМУИДМП В структурной схеме система разбита на звенья исходя из их математического описания. Динамическое звено – искусственно выделяемая часть автоматической системы, описываемая уравнением определенного вида. Динамическое звено может не иметь физического смысла, а лишь отражать какую-либо математическую зависимость между некоторыми величинами элемента. g – задающее воздействие (поворот штурвала); ε – ошибка (рассогласование g и θ 2 ); U 1 – напряжение на входе в МУ; U 2 – напряжение на обмотках управления; θ 1 – необходимый угол поворота ИД; θ 1 – угол на который не довернется ИД из-за момента сопротивления; М Н – момент нагрузки на валу ИД (возмущающее воздействие); θ 1 – управляющее воздействие (поворот вала ИД); θ 2 – управляемая величина (поворот баллера руля); E S – э.д.с. наводимая ЭМУ.
W 3 (p)W 4 (p)W 5 (p)W 1 (p) W 4 (p) gεU1U1 U2U2 EsEs θ 1 θ1θ1 θ2θ2 θ2θ2 MНMН С1С2С1С2 МУЭМУИДМП В структурной схеме система разбита на звенья исходя из их математического описания. Динамическое звено – искусственно выделяемая часть автоматиче")
6
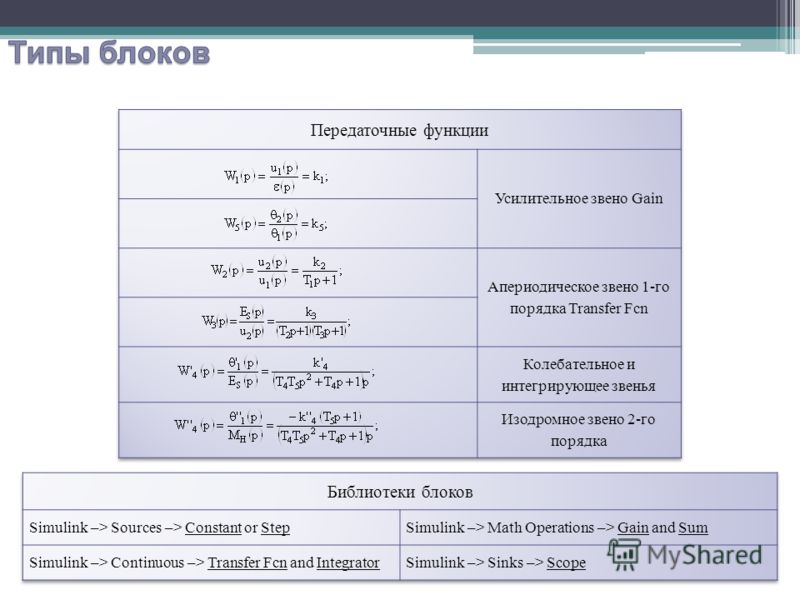
В ТАУ используются две аналитические формы представления динамических характеристик: дифференциальные уравнения; передаточные функции. Передаточная функция звена – это отношение выходного параметра к входному, представленное в операторном виде. W(p) FY Y = W(p) · F
")
7
Переходная, или временная характеристика (функция) звена представляет собой реакцию на выходе звена, вызванную подачей на его вход единичного ступенчатого воздействия Единичное ступенчатое воздействие (единичная ступенчатая функция) – это воздействие, которое мгновенно возрастает от нуля до единицы и далее остается неизменным Единичное ступенчатое воздействие обозначается 1(t) и может быть описано следующим равенством Simulink –> Sources –> Step t h 0 1(t)
 звена представляет собой реакцию на выходе звена, вызванную подачей на его вход единичного ступенчатого воздействия Единичное ступенчатое воздействие (единичная ступенчатая функция) – это воздействие")
8
Частотные характеристики описывают установившиеся вынужденные колебания на выходе звена, вызванные гармоническим воздействием на входе Если на вход звена направленного действия подано гармоническое воздействие где x max – амплитуда, а – угловая частота этого воздействия то по окончании переходного процесса на выходе звена будут существовать гармонические колебания с той же частотой, что и входные колебания, но отличающиеся в общем случае по амплитуде и фазе, т.е. в установившемся режиме выходная величина звена где y max – амплитуда выходных установившихся колебаний; – фазовый сдвиг между входными и выходными колебаниями Амплитудно-частотная характеристика (АЧХ) выражает отношение амплитуды колебаний на выходе звена к амплитуде колебаний на его входе в зависимости от частоты выходного сигнала Фазово-частотная характеристика (ФЧХ) выражает зависимость разности фаз между входными и выходными колебаниями звена от частоты входного сигнала

9
Усилительным (пропорциональным) называют звено, у которого выходная величина в каждый момент времени пропорциональна входной величине. Уравнение усилительного звена Передаточная функция усилительного звена Simulink –> Math Operations –> Gain
 называют звено, у которого выходная величина в каждый момент времени пропорциональна входной величине. Уравнение усилительного звена Передаточная функция усилительного звена Simulink –> Math Operations –> Gain")
10
Апериодическим (инерционным) называют звено, в котором при подаче на вход ступенчатого сигнала выходная величина апериодически (по экспоненте) стремится к новому установившемуся значению Уравнение апериодического звена Передаточная функция апериодического звена Simulink –> Continuous –> Transfer Fcn где Т – постоянная времени звена, характеризующая инерционность звена, с; k – коэффициент усиления звена
 называют звено, в котором при подаче на вход ступенчатого сигнала выходная величина апериодически (по экспоненте) стремится к новому установившемуся значению Уравнение апериодического звена Передаточная функция апериодиче")
11
Колебательным называют звено, у которого при ступенчатом изменении входной величины выходная величина стремится к новому установившемуся значению, совершая при этом колебания Уравнение колебательного звена Передаточная функция колебательного звена где T 1 и T 2 – постоянные времени колебательного звена; k – коэффициент усиления колебательного звена Simulink –> Continuous –> Transfer Fcn Постоянные времени колебательного звена T 1 и T 2 связаны зависимостью Коэффициент называют коэффициентом колебательности и, судя по названию, он характеризует колебательность переходного процесса колебательного звена. Если < 1, то переходный процесс звена – колебательный, и чем меньше единицы, тем колебательнее процесс. Если 1, то получаем апериодическое звено второго порядка

12
Интегрирующим называют звено, в котором выходная величина пропорциональна интегралу во времени от входной величины Уравнение интегрирующего звена Передаточная функция интегрирующего звена Simulink –> Continuous –> Integrator

13
Дифференцирующим называют звено, в котором выходная величина пропорциональна производной по времени от входной величины. В дифференцирующем звене выходная величина пропорциональна скорости изменения входной величины Уравнение дифференцирующего звена Передаточная функция дифференцирующего звена Simulink Extras –> Linearization –> Switched derivative for linearization

14
1.Дать определение основным понятиям ТАУ: автоматическое регулирование, управляемый объект, управляемая величина, управляющие воздействия, возмущающие воздействия, задающие воздействия. 2.Особенности функциональной схемы САУ. Как составляется. 3.Особенности структурной схемы САУ. Как составляется. 4.Определение передаточной функции звена. 5.Переходная характеристика звена. Определение. 6.Единичное ступенчатое воздействие. Определение, график. 7.Частотные характеристики звена. Определение. 8.Амплитудно-частотная характеристика звена. Определение. 9.Фазово-частотная характеристика. Определение. 10.Усилительное звено. Уравнение, передаточная функция, представление в MATLAB. 11.Апериодическое звено. Уравнение, передаточная функция, представление в MATLAB. 12.Колебательное звено. Уравнение, передаточная функция, представление в MATLAB. 13.Интегрирующее звено. Уравнение, передаточная функция, представление в MATLAB. 14.Дифференцирующее звено. Уравнение, передаточная функция, представление в MATLAB.

Еще похожие презентации в нашем архиве:


















 Введение.")




