Скачать презентацию
Идет загрузка презентации. Пожалуйста, подождите

1
Творческая лаборатория « Внеурочная деятельность учащихся в условиях внедрения ФГОС. Спортивная робототехника » Занятие 2 Траектории и лабиринты

2
Соревнования « Следование по линии » Условия состязания 1. За наиболее короткое время робот, следуя черной линии, должен добраться от места старта до места финиша. 2. На прохождение дистанции дается максимум 1 минута. 3. Если робот потеряет линию более чем на 5 секунд, он будет дисквалифицирован. 4. Во время проведения состязания участники команд не должны касаться роботов. Трасса 1. Цвет полигона – белый. 2. Цвет линии – черный. 3. Ширина линии – 50 мм. 4. Минимальный радиус кривизны линии – 300 мм.

3
Соревнования « Следование по линии » Робот 1. Максимальная ширина робота 40 см, длина - 40 см. 2. Вес робота не должен превышать 10 кг. 3. Робот должен быть автономным. 4. Готовые роботы, не требующие сборки, например Polulu 3pi, SumoBot от Parallax, Sumovor от Solarbotics и т. д., имеющие готовые алгоритмы прохождения линии не допускаются к участию в соревновании Правила проведения соревнования 1. В соревновании робот участника стартует и финиширует на одной стартовой позиции. На прохождение дистанции каждой команде дается не менее двух попыток ( точное число определяется судейской коллегией в день проведения соревнований ). В зачет принимается лучшее время из попыток. 2. Победителем будет объявлена команда, потратившая на преодоление дистанции наименьшее время. 3. Процедура старта : робот устанавливается участником на линии перед стартовой линией. До команды « СТАРТ » робот должен находиться на поверхности полигона и оставаться неподвижным. После команды « СТАРТ » участник должен запустить робота и быстро покинуть стартовую зону. Началом отсчета времени заезда является момент пересечения передней частью робота стартовой линии. Окончанием отсчета времени заезда является момент пересечения передней частью робота финишной линии. 4. Если робот потеряет линию более чем на 5 секунд и / или « срежет » траекторию движения, он будет дисквалифицирован.

4
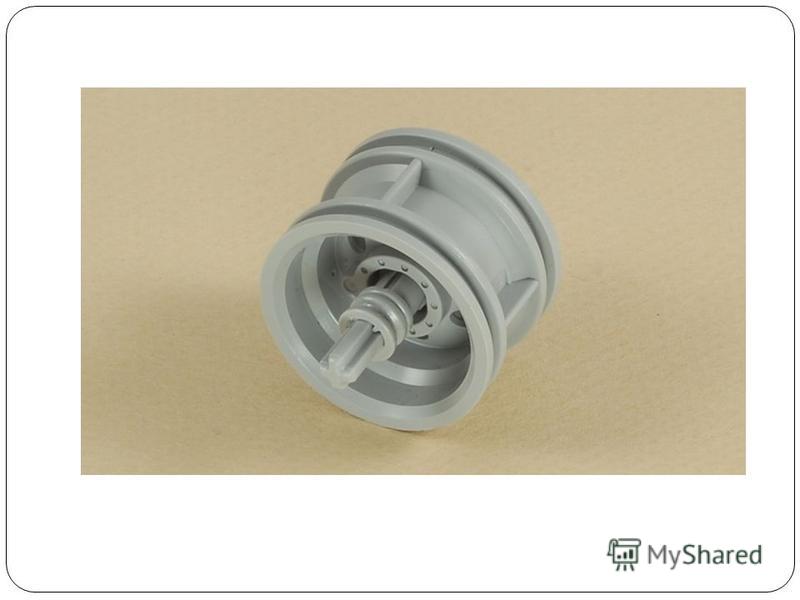
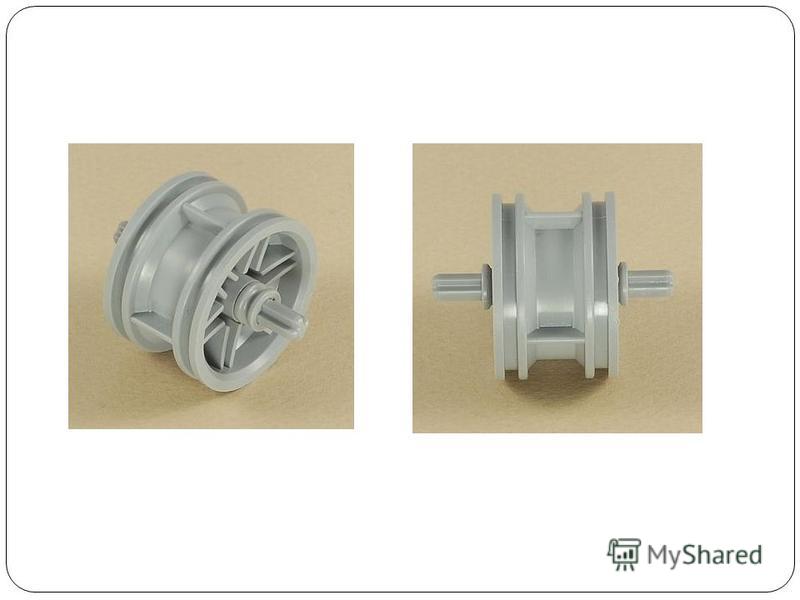
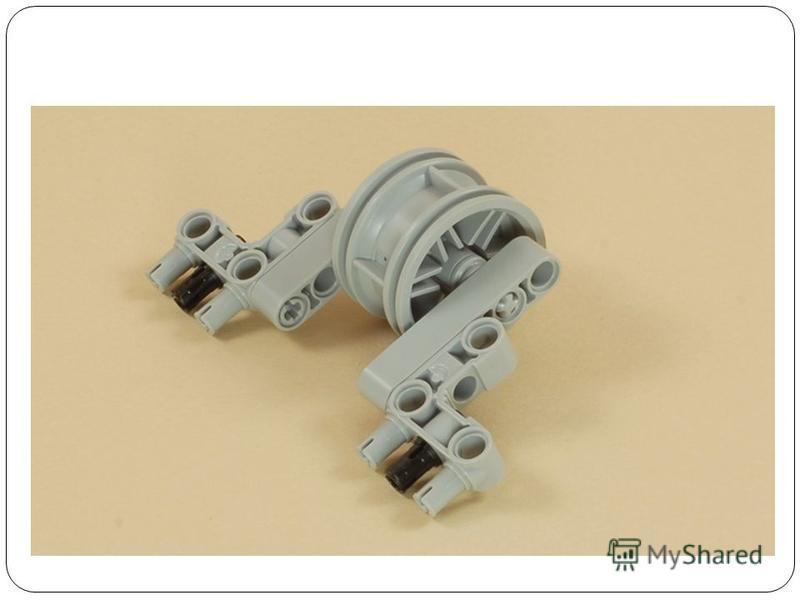
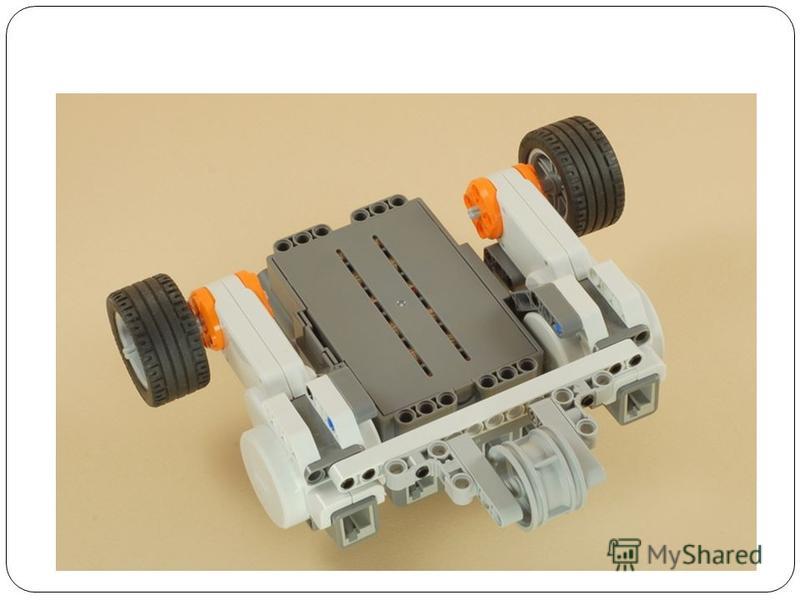
Сборка робота Робот будет следовать по линии на полу с помощью датчика освещенности NXT 2.0. Алгоритм сборки : 1. собираем « робота пятиминутку » 2. Подсоединяем датчик освещённости

5
Робот « Пятиминутка »

7
6 6

27
Используйте два средних длинных провода для подключения двух двигателей привод в порты В и С на NXT.

28
Внимание : Убедитесь, что порт B подключен к мотору на той же стороне B, и C с двигателем на стороне C.

29
Подключение датчика

33
На забудьте подключить датчик к порту ( например к 3)
")
34
Главное меню NXT Подсоедините датчики или моторы к NXT. Меню View поможет выбрать правильный порт или проверить настройки. Выберите View на экране NXT. 1. Выберите значок датчика или мотора, который нужно протестировать. За один раз можно считать показания или проверить состояние только одного датчика или мотора. 2. Выберите порт, к которому подсоединён датчик или мотор. 3. Данные от мотора или датчика появятся на экране.

35
Программирование Lego mindstorms education NXT 2.1 Programming – запустить с рабочего стола

36
Блок « Движение » 1. Буквы в правом верхнем углу блока показывают, какие порты NXT будут контролироваться. 2. Эта пиктограмма показывает направление движения робота. 3. Эта пиктограмма показывает уровень мощности. На скорость робота также влияют различные условия, например, состояние поверхности, по которой он движется, подъём или спуск. 4. Эта пиктограмма показывает, как задан параметр « Отработать »: Без ограничения, в градусах, оборотах или секундах. 1. Эта пиктограмма показывает, что в параметрах « Направление » задана команда « Стоп ». При этой установке все моторы выключаются.

37
1. Выберите моторы, которыми нужно управлять. При управлении двумя моторами ( например, B и C), они синхронизируются и вращаются вперед или назад при одинаковой мощности. Если нужно управлять тремя моторами, то синхронизируются моторы B и C. 2. Выберите направление вращения мотора : вперед или назад, или его остановку. При выборе команды « Стоп » настройки моторов также сбрасываются. 3. Если для управления роботом используются два мотора ( по одному с каждой стороны ), появляется движок управления, буквы на каждой из его сторон соответствуют выбранным портам. Для задания движения робота по кривой переместите движок. Если его сдвинуть в одно из крайних положений, робот будет поворачиваться на месте. 4. Этим движком можно задать уровень мощности [0-100 %], или ввести значение в поле ввода. 5. В списке « Время » можно выбрать работу мотора в течение неограниченного времени, определённого количества секунд, оборотов [ настройка по умолчанию ] или градусов поворота вала. Указывая значение параметра « Секунды », « Обороты » или « Градусы », вы однозначно определяете длину перемещения робота. ( См. совет ниже.) 6. Задайте действие моторов после выключения : « Тормозить » или « Катиться ». Если робот должен остановиться точно в заданном месте, выберите « Тормозить ». Это также предотвратит скатывание робота по наклонной поверхности, однако при такой настройке увеличивается расход заряда аккумулятора NXT, поскольку моторы работают, удерживая робота на месте. 7. В поле обратной связи отображается количество градусов поворота вала мотора или количество полных оборотов, совершённых им. Нажмите кнопку сброса чтобы обнулить показания. ( Эту информацию можно получать, если мотор подключен к выбранному порту и установлена связь с NXT.)
, они синхронизируются и вращаются вперед или назад при одинаковой мощности. Если нужно управлять тремя моторами, то синхронизируются моторы B и C. 2. Выбер")
38
Блок « Датчик освещенности » 1. Число указывает, к какому порту NXT подключен к Датчик освещённости. При необходимости это число можно изменить в панели настройки. 2. Эта пиктограмма показывает при каком уровне освещённости блок среагирует. Чем больше на пиктограмме окрашенных полосок, тем для более высокой освещённости задано пороговое значение. 3. Пиктограмма отображается в том случае, если активирована функция Включить подсветку.

39
Блок « Датчик освещенности » 1. Выберите порт, к которому подключен Датчик освещённости. По умолчанию Блоку «Датчик освещённости» назначен Порт 3. При необходимости эту настройку можно изменить. 2. Пороговое значение можно задать движком или ввести нужное значение в поле. Активируйте кнопку выбора справа от движка, чтобы блок срабатывал при уровнях освещённости, превышающих пороговое значение; активируйте левую кнопку выбора, чтобы блок срабатывал при уровнях освещённости более низких, чем пороговое значение. Для задания условия срабатывания датчика можно воспользоваться открывающимся списком. 3. Если установлен флажок "Включить освещение ", датчик включает свою лампу подсветки и регистрирует отражённый свет. 4. В поле обратной связи отображаются текущие показания Датчика освещённости (0-100%). Этим можно воспользоваться для опробования различных пороговых значений.

40
Блок « Цикл » Этот блок используется для повтора последовательностей команд. Назначьте условие, необходимое для завершения цикла : истекшее время, количество повторов, логическая команда, сигнал от датчика, бесконечное повторение цикла.

41
Блок « Переключатель » Этот Блок используют для выбора одной из двух последовательностей команд. Например, если Блок « Переключатель » сконфигурирован под датчик касания, то он должен запустить одну последовательность Блоков в случае, если датчик нажат, и другую последовательность - если датчик не нажат.

42
Программа 1. Робот на старте стоит справа от линии 2. В зависимости от освещенности с большей мощностью работает один или другой мотор

43
Переключатель

44
Блоки движения

45
Аналогичные свойства устанавливаем для блоков движения на ветке « Иначе »

46
Ура !!! Получилось !!! Проверяем !!!

47
Возможные эксперименты Обязательно попробуйте другие трассы, создав собственную. Трассу можно создавать из обычной изоленты чёрно цвета, потому что это она чёрная и гибкая, а также не оставляет следов на полу при отрывании от пола. При создании трассы, обязательно, сделайте несколько прямых участков, резких поворотов. Проведите эксперименты и выясните на какой трассе робот ведёт себя лучше всего, вылетает ли он с трассы ? И при каких условиях ? Поэкспериментируйте также с настройкой уровня мощности двигателей, выберите такие значения в программе, при которых робот не вылетает из трассы и всегда проходит её без проблем. Соберите другую модель робота ( разработайте сами ). Установите датчик освещенности на другого робота и посмотрите, будет ли он тоже следовать по линии. Какие роботы следуют по линии лучше, какие хуже ? Конечно, на движение робота будут влиять место положения серводвигателей, колёс, датчика. Попробуйте изменить значение переменной " Мощность ", чтобы попытаться настроить управляемость, необходимую для вашего робота.

48
Задание : 1. Подключить датчик расстояния 2. На определенном расстоянии от препятствия робот должен остановиться ( обойти препятствие и пр.) Цикл не бесконечный, а зависит от датчика расстояния !!!
 Цикл не бесконечный, а зависит от датчика расстояния !!!")
Еще похожие презентации в нашем архиве:


























, и продемонстрировать перемещение.")












