Девятериков Е. А. Научно-учебный центр «Робототехника» МГТУ им. Н.Э. Баумана Руководитель Михайлов Б. Б.
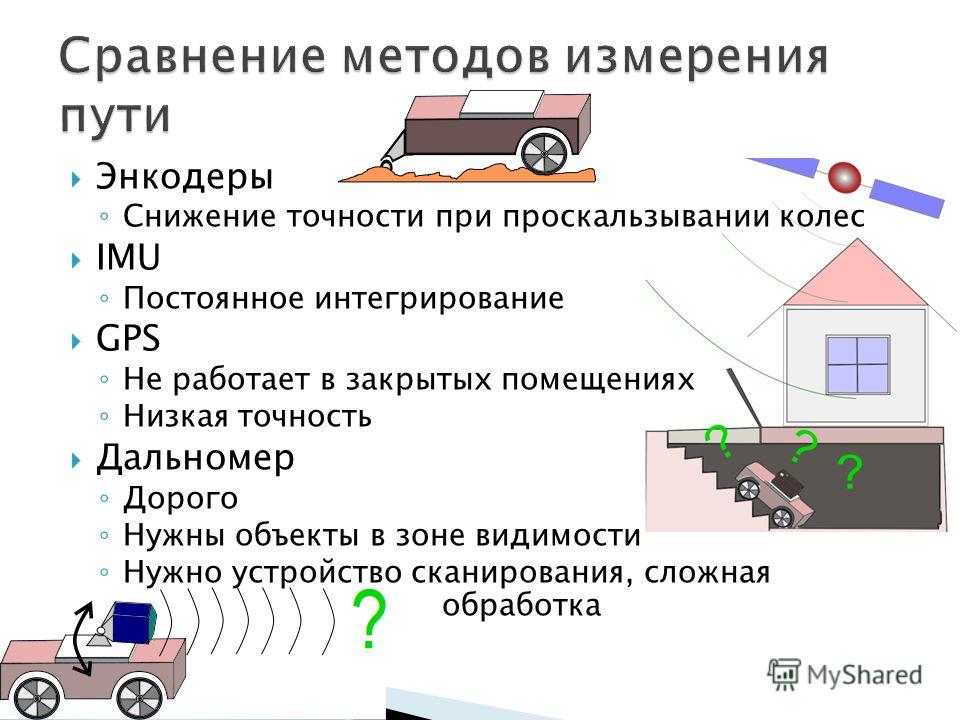
Энкодеры Снижение точности при проскальзывании колес IMU Постоянное интегрирование GPS Не работает в закрытых помещениях Низкая точность Дальномер Дорого Нужны объекты в зоне видимости Нужно устройство сканирования, сложная обработка
Работает в недетерминированной среде Наличие камер позволяет решать другие задачи Нечувствительна к проскальзыванию колес
Разработать алгоритм измерения пути Программно реализовать алгоритм Разработать 3D модель для тестирования алгоритма Изготовить макетный образец системы Провести экспериментальные исследования системы на мобильном роботе
Выравнивание Поиск особых точек Вычисление 3D координат Вычисление перемещения
Метод Гарриса Метод FAST N > 9?
Ограничения Постоянство яркости Маленькие смещения Когерентные смещения
Точки инвариантны к: масштабу повороту искажениям
Среднее квадратичное отклонение при многократном смещении на малые равные расстояния Ошибка выхода в исходную точку при движении по замкнутой траектории
FPSСреднее квадратичное отклонение, % FAST HARRIS SURF
FPSОшибка, % FAST HARRIS SURF
Алгоритм Скорость обработки (FPS), кадров/c Ошибка выхода в исходную точку, % Среднее квадратичное отклонение при перемещении на равные интервалы, % FAST HARRIS SURF
разработан алгоритм визуальной одометрии; алгоритм реализован в виде программы; алгоритм проверен на тестовых изображениях с разработанной 3х мерной модели системы; изготовлен макет системы визуальной одометрии; проверена работоспособность системы на реальных изображениях, полученных при движении мобильного робота, определены ее точность и быстродействие.